CAN-bus测试软件与接口函数库V2.0使用指南
"CAN-bus 通用测试软件及接口函数库使用手册 V2.0"
CAN-bus(Controller Area Network)是一种汽车电子设备之间通信的串行通信协议,广泛应用于汽车、工业自动化、医疗设备等领域。本手册主要针对CAN-bus的测试软件和接口函数库的使用进行详细说明,帮助用户进行设备操作、数据传输和错误处理。
测试软件使用说明:
1. 设备操作:
- 设备类型选择:用户可以根据实际使用的CAN-bus设备类型进行选择。
- 打开设备:连接到选定的CAN-bus设备。
- 设置参数:配置CAN总线参数,如波特率、数据长度等。
- 获取设备信息:查看设备的基本信息,如硬件版本、固件版本等。
- 启动CAN和复位CAN:开启或复位CAN总线,确保通信正常。
- 发送数据:通过软件向CAN总线发送数据帧。
2. 辅助操作:
- 设置数据列表缓冲帧数:设定缓存区能存储的帧数。
- 定位到指定帧:在数据列表中快速查找特定帧。
- 保存数据到文件:将接收到的数据保存为文件,便于分析和记录。
- 刷新数据列表:更新显示的数据,确保实时性。
- 暂停/继续显示:控制数据显示,便于观察或避免屏幕过载。
- 总是显示最后一行数据:保持显示最新接收到的数据。
接口函数库说明及其使用:
1. 接口卡设备类型定义:定义了不同类型的CAN-bus接口卡。
2. 错误码定义:提供错误代码,帮助识别和解决操作过程中遇到的问题。
3. 数据结构定义:
- VCI_BOARD_INFO:包含设备的基本信息。
- VCI_CAN_OBJ:表示一个CAN数据帧结构。
- VCI_CAN_STATUS:描述CAN总线的状态。
- VCI_ERR_INFO:记录设备的错误信息。
- VCI_INIT_CONFIG:初始化配置结构体。
- CHGDESIPANDPORT:改变设备的IP地址和端口。
4. 接口库函数说明:
- VCI_OpenDevice:打开设备。
- VCI_CloseDevice:关闭设备。
- VCI_InitCan:初始化CAN总线。
- VCI_ReadBoardInfo:读取设备信息。
- VCI_ReadErrInfo:读取错误信息。
- VCI_ReadCanStatus:获取CAN总线状态。
- VCI_GetReference:获取参考值。
- VCI_SetReference:设置参考值。
- VCI_GetReceiveNum:获取接收队列中的帧数。
- VCI_ClearBuffer:清除接收缓冲区。
- VCI_StartCAN:启动CAN通信。
- VCI_ResetCAN:复位CAN总线。
- VCI_Transmit:发送数据帧。
- VCI_Receive:接收数据帧。
5. 使用方法:提供了在VC和VB环境下调用动态库的示例代码。
6. 使用流程:详细步骤指导用户如何正确使用接口库进行设备操作和数据传输。
Linux下动态库的使用:
这部分主要涉及在Linux系统中安装驱动程序,以及如何在Linux环境中利用动态库进行CAN-bus通信,包括编译、链接和调用函数库的方法。
这份手册为开发者和测试工程师提供了全面的指南,涵盖了从软件操作到底层接口函数的使用,是进行CAN-bus通信开发和测试的重要参考资料。
1.2. 辅助操作
本软件中还设置了一些辅助操作,以方便您能够更好的观察和分析 CAN 数据,在“编辑”菜单中的
各项操作即为辅助操作:
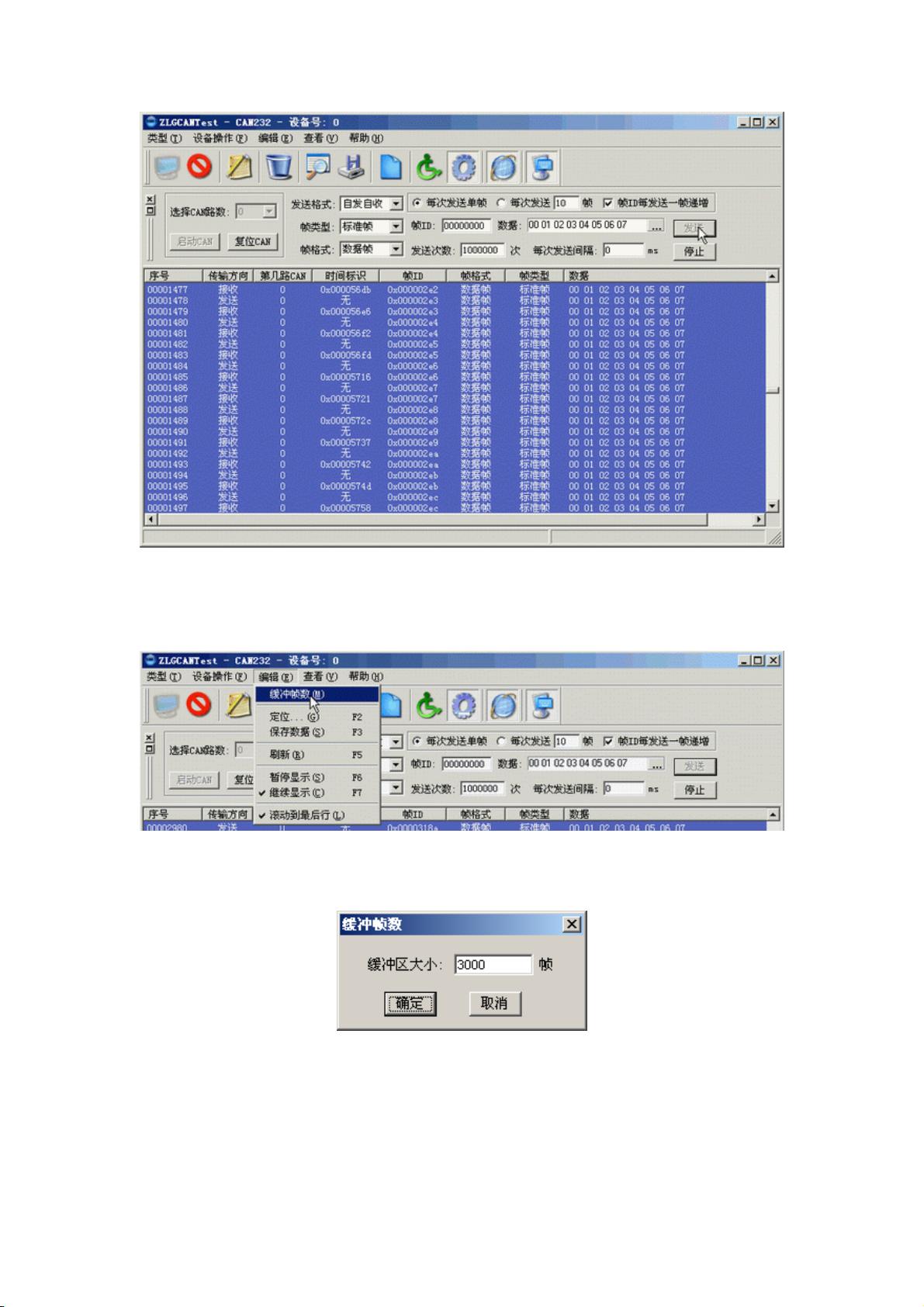
1.2.1. 设置数据列表缓冲帧数
通过设置缓冲区大小来改变当前屏幕所能缓冲显示的最大帧数,如下图:
1.2.2. 定位到指定帧
在下面这个对话框中输入您想要观察的数据行,就可以跳转到指定行:
5

剩余44页未读,继续阅读
407 浏览量
127 浏览量
253 浏览量
145 浏览量
407 浏览量
253 浏览量
107 浏览量
点击了解资源详情
809 浏览量

卡索-Builder
- 粉丝: 0
 我的内容管理
展开
我的内容管理
展开







最新资源
- ThinkPHP5企业级网站模板源码合集下载
- 中兴光猫配置清零工具使用指南及应用场景解析
- Python脚本实现GEE遥感数据时间序列子集划分
- 热门小工具:HTML技术的创新应用
- 节日表白大作战:创意JS、CSS、Canvas项目
- Chipmunk.jl: 实现Julia与物理引擎Chipmunk的绑定
- reactive-rabbit:基于AMQP协议的Scala Reactive Streams驱动
- Matlab开发工具:MFileSelector的应用与功能
- Ruckus VF2825固件升级至V5.0.4版本教程
- C#环境下使用Halcon12采集电脑及工业相机图像
- AF103WebDesign:HTML布局的革命
- donateme:简易PayPal募捐网站项目介绍
- WebTorrent命令行界面:利用WebRTC实现高效流式传输
- 小程序幻灯片组件使用及依赖介绍
- 快速解压部署JDK11,无需安装直接使用
- MATLAB STRUCTCOMPVIS:结构比较视觉差异工具
