安川DX200视觉配置详解:步骤、选型与实现
需积分: 50 131 浏览量
更新于2024-07-15
6
收藏 6.14MB PDF 举报
本文档详细介绍了安川DX200视觉系统的配置流程,主要针对的是在安川首钢机器人有限公司内部使用的版本V2.0.0。该版本在原有V1.0.0的基础上进行了完善步骤,旨在帮助用户更好地理解和操作DX200视觉系统。
首先,章节"DX200视觉系统构成及选型"部分,阐述了系统的基本组成。1.1节介绍了DX200视觉系统的构成,包括硬件模块如相机、镜头和光源等,以及软件方面的CCD(Charge-Coupled Device)安装方式。1.2节讲解了相机成像原理,这对于理解图像采集过程至关重要。1.3节讨论了相机精度与像素的关系,强调了高分辨率对视觉任务的影响。1.4节着重于相机镜头的选择,涉及焦距、视场角等因素,确保相机能捕捉到所需信息。1.5节涉及光源的选择,因为合适的照明对于图像质量有直接影响。最后,1.6节给出了机器人视觉选型的步骤,强调了根据实际应用场景来确定合适配置的重要性。
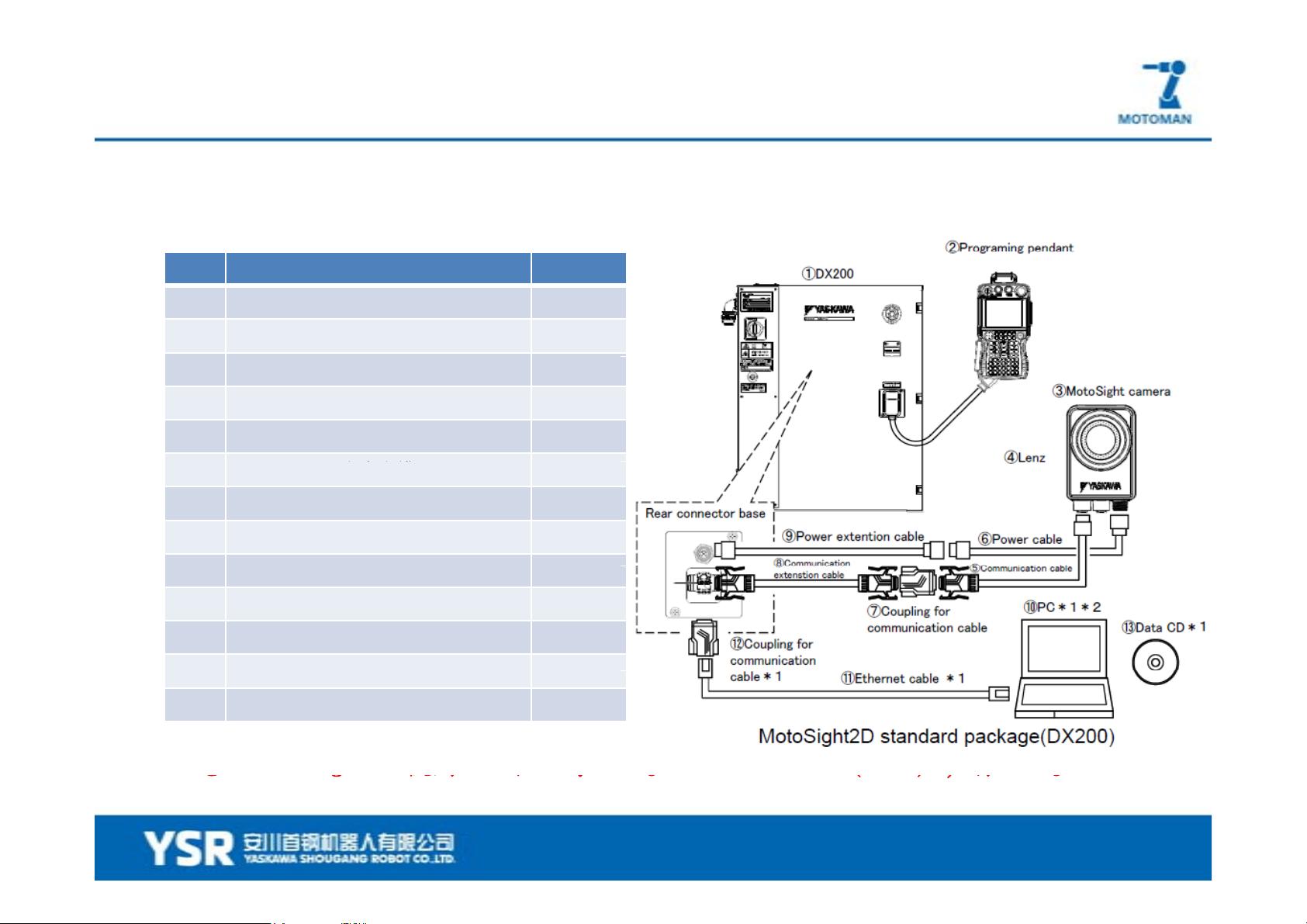
第二部分"DX200视觉系统配置"涵盖了实际操作步骤。2.1节列出了DX200的硬件标准配置,包括可能需要的硬件接口和配件。2.2节介绍了调试电脑的配置要求,这对保证系统与机器人控制器的顺畅通信至关重要。2.3节讲述了Cognex软件的安装,这是一款用于视觉系统编程和数据分析的工具。2.4节提供了系统IP地址分配表,这是网络连接和数据传输的基础。
第三部分"DX200视觉系统实现步骤"详细介绍了实际操作过程。3.1节指导用户如何设置电脑的IP地址,确保网络连通性。3.2节特别关注相机IP地址的设置,这是一个关键环节,因为每个设备都需要独立的IP地址才能在网络中识别和通信。
这篇文档提供了从系统选型、硬件配置到网络设置的完整流程,旨在帮助用户顺利地在安川DX200机器人上集成和利用视觉功能,实现精确的自动化任务。无论是初次接触还是经验丰富的用户,都能从中找到所需的信息和指导。
安川首钢机器人有限公司
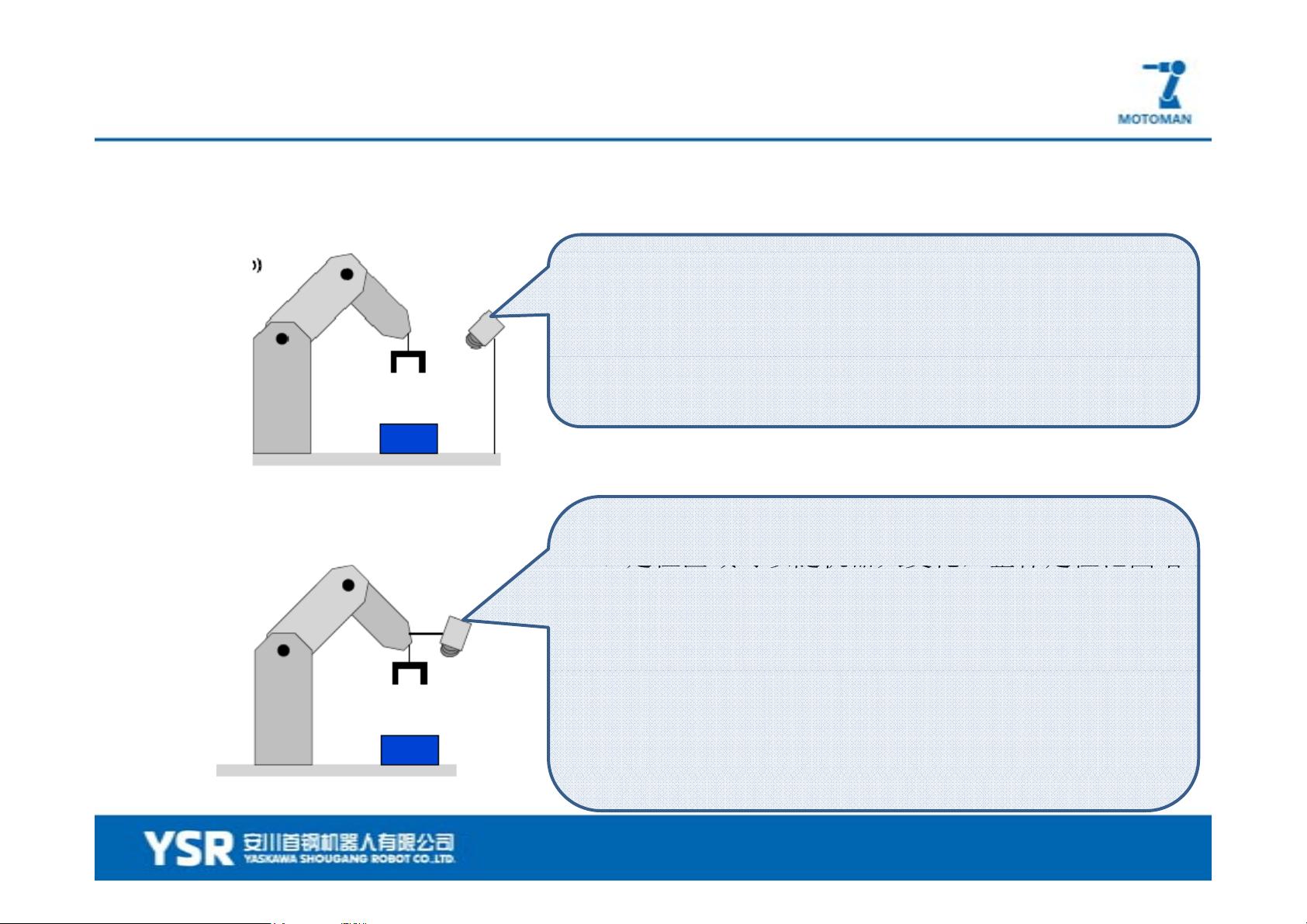
1.7、CCD安装方式选择
•固定相机 (fixed camera)
优势
优势
:
1、可以在机器人运动时照相。
2、照相机连接电缆铺设简易化。
劣势
劣势
:
1、检测区域固定化。
优势:
1
、
定位
区域
可以随机器人变化
,
整体
定位
范围
增
•运动相机 (moving camera)
、
定位
区域
可以随机器人变化
,
整体
定位
范围
增
加。
2、检测精度提升。
3、易拓展再检测功能。
劣势:
1、机器人必须停止照相。
2、必须注意光源是否被机器人或外围设备干涉。
3、必须注意照相机连接电缆的磨损现象。
11
剩余64页未读,继续阅读
2021-10-11 上传
729 浏览量
2022-01-27 上传
2021-09-30 上传
2019-05-22 上传
点击了解资源详情

qq_41036561
- 粉丝: 2
- 资源: 7
 我的内容管理
展开
我的内容管理
展开







最新资源
- ES管理利器:ES Head工具详解
- Layui前端UI框架压缩包:轻量级的Web界面构建利器
- WPF 字体布局问题解决方法与应用案例
- 响应式网页布局教程:CSS实现全平台适配
- Windows平台Elasticsearch 8.10.2版发布
- ICEY开源小程序:定时显示极限值提醒
- MATLAB条形图绘制指南:从入门到进阶技巧全解析
- WPF实现任务管理器进程分组逻辑教程解析
- C#编程实现显卡硬件信息的获取方法
- 前端世界核心-HTML+CSS+JS团队服务网页模板开发
- 精选SQL面试题大汇总
- Nacos Server 1.2.1在Linux系统的安装包介绍
- 易语言MySQL支持库3.0#0版全新升级与使用指南
- 快乐足球响应式网页模板:前端开发全技能秘籍
- OpenEuler4.19内核发布:国产操作系统的里程碑
- Boyue Zheng的LeetCode Python解答集
