C语言编程指南:创建与控制虚拟机器人
"虚拟机器人 C语言机器人编程指南"
在虚拟机器人编程中,C语言是一种常见的编程语言,尤其适用于教育和竞赛场景。本指南主要针对使用C语言进行机器人编程的新手,由“机器人焦点”发布,旨在帮助学习者掌握基本的机器人编程技能。
1. 创建虚拟机器人
创建机器人项目的第一步是在开发环境中选择“创建机器人项目”。在本例中,使用了CodeCanvas,这是一个专为初学者设计的机器人开发工具。项目名称设为“Swing”,选择C语言作为项目类型。完成这些步骤后,CodeCanvas会自动生成一个包含基本框架的`Swing.c`文件。
2. 编写机器人代码
机器人执行的核心在于`run()`函数,这是机器人程序的主循环。在`run()`函数中,你可以编写控制机器人行为的代码。例如,为了实现一个来回摆动的机器人,可以在`run()`函数中加入前进和后退的动作,如`doMoveAhead(150)`和`doMoveBack(150)`,这两个函数分别表示机器人向前走150单位和向后退150单位。
3. 编译机器人
在CodeCanvas中,需要配置C编译器(如GCC)的路径。设置完成后,通过选择“构建”->“构建项目”来编译机器人程序。确保正确安装了编译器,并指定了正确的路径,否则编译过程可能无法正常进行。
4. 运行机器人
在AI-RCJ(假设是一个模拟比赛环境)中,新建一个比赛场景,然后将编译好的机器人“Swing”添加到机器人列表中。如果未立即显示在列表中,可以通过刷新按钮来更新。
5. 代码解析
对于初学者,理解代码的每个部分至关重要。代码解析部分会对`doMove Ahead()`和`doMoveBack()`函数的工作原理进行解释,帮助学习者理解如何控制机器人的运动。
6. 打开原有项目与系统设定
在开发过程中,可能会涉及到打开已有的机器人项目进行修改或扩展。系统设定部分可能涉及机器人参数调整、比赛规则设置等,以适应不同的任务需求。
7. 实现特定行为
例如,实现机器人走圆形,需要对机器人运动的轨迹进行精确控制。这部分会介绍如何分析问题,然后编写相应的代码来实现这个功能。
8. 控制方式的比较
在实践中,可能存在多种控制机器人的方式。本指南可能会对比不同控制策略的优缺点,帮助学习者选择最适合的方法。
9. 机器人编队
在团队比赛中,机器人需要协同工作,编队操作是必要的。这部分会讲解如何让多个机器人协调行动。
10. 获取比赛信息
了解比赛规则和信息对于编写符合要求的机器人至关重要。这部分可能包括如何解析比赛指令、获取比赛状态等。
11. 机器人编程接口
`Robot.h`, `Info.h`, `Operate.h` 和 `Debug.h` 是一些常见的头文件,提供了机器人编程的基本接口。`Robot.h`可能包含创建和控制机器人的一般函数,`Info.h`用于获取机器人自身的状态,`Operate.h`则包含各种操作机器人的函数,而`Debug.h`则用于调试目的。
12. 各种Toolkit和数学函数
在编写机器人程序时,可能会用到各种工具包(Toolkit)来辅助实现特定功能,如路径规划、传感器处理等。同时,常用数学函数可以帮助计算机器人运动轨迹和处理数据。
13. Action和Action处理函数
`Action`是机器人执行的某种操作,而`Action处理函数`则用于定义这些操作的具体实现,如移动、转向、抓取物体等。
通过以上内容,读者将能够逐步掌握虚拟机器人编程的基础知识,从而能创建、编译并运行自己的C语言机器人项目。
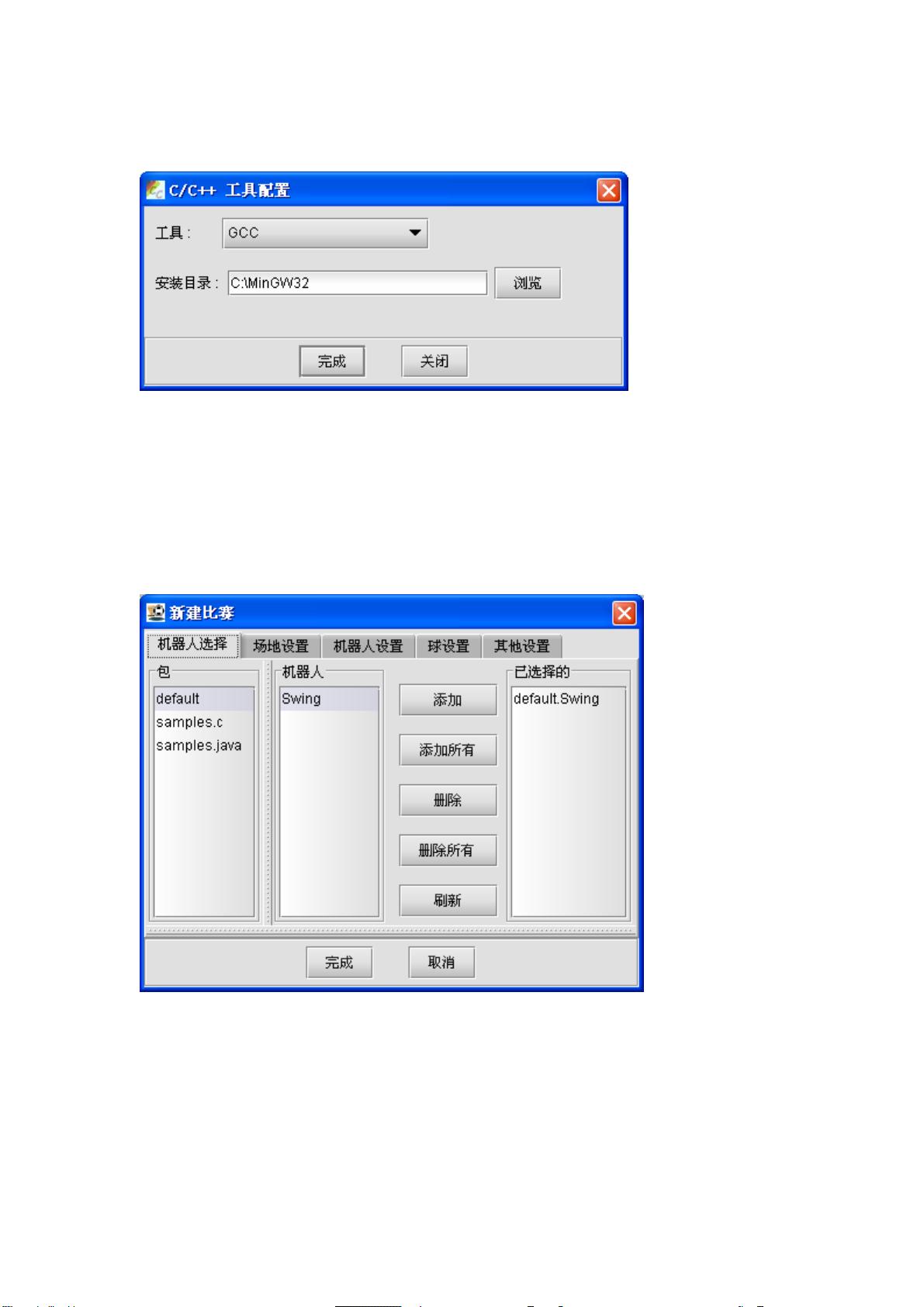
->C/C++
环境设置
,然后在出现的 C/C++环境设置对话框中输入 GCC 编译器的安装路径,
如 C:\MinGW32,点击完成即可。(目前只支持 GCC 编译器)
在 CodeCanvas 中选择
构建
->
构建项目
,我们的机器人就创建完成了。
运行机器人
在 AI-RCJ 中选择
新建
->
比赛
,在包列表中选择 default,在机器人列表中选择 Swing,将 我
们的机器人添加到右边的列表中。(如果没有看到我们的机器人,可以按
刷新
按钮更新机器
人列表)
注意,这时机器人所在的包为默认的 default,机器人名和包名可以通过
工具
->
机器人管理
来修改。点击完成,就可以看到机器人在场地中来回摆动。
剩余15页未读,继续阅读
200 浏览量
199 浏览量
2024-04-12 上传
200 浏览量
131 浏览量
点击了解资源详情

erosmickey
- 粉丝: 3
- 资源: 10
 我的内容管理
展开
我的内容管理
展开







最新资源
- zabaatLib:vvolfster的QML Qt UI和应用程序库
- proposal-array-equality:确定数组相等
- SQLite v3.28.0
- jQuery css3图标动画鼠标滑过图标旋转动画特效
- vecel-antenna
- MP3格式万能转换器任何音频均可自由切换格式
- 黑马瑞吉外卖源码及工程项目全套
- Foodfy-database:Persistindo dados daaplicaçãoFoodfy
- 展示::framed_picture:课程中展示的最佳学生作品展示
- Open Virtual Reality 'L'-开源
- 影响matlab速度的代码-table-testing:表达式矩阵文件格式的要求,示例和测试
- 行业文档-设计装置-饲料用缓释型复方甜菊糖微囊的制备方法.zip
- RedisSubscribeServer.zip
- Wireshark-win32-1.8.4
- C# winform设计 钉钉 微信 二维码 扫码登录登录客户端 源码文件 CS架构
- Martin_Barroso_P2:RISCV Multiciclo con UART para corrercódigo阶乘
