CAN与J1939协议详解:原理、格式与实例分析
本文主要介绍了CAN协议的基本概念、工作原理及其在汽车电子系统中的应用,同时深入探讨了J1939协议,包括PDU格式、报文实例分析以及J1939的连接管理和多包传输机制。此外,还对比了Intel与Motorola两种报文格式的区别。
CAN总线是一种广泛应用的现场总线,由BOSCH公司为汽车电子系统设计,具有高可靠性和高性能。随着汽车电子化的发展,CAN总线成为解决大量数据交换问题的有效方案。它遵循ISO11898和ISO11519国际标准,并主要分为CAN2.0A(标准格式)和CAN2.0B(扩展格式)两个版本。汽车中常见的CAN网络包括高速CAN(500kb/s)用于驱动系统,低速CAN(100kb/s)用于车身系统。
CAN协议的报文格式包括标准帧和扩展帧,由标识符、数据段、CRC校验和其它控制字段组成。报文的总线仲裁机制确保了优先级高的数据能够快速传输。J1939协议是针对重型车辆和商用车辆的通信协议,基于CAN总线,特别关注数据的传输效率和错误处理。J1939的报文格式中,PDU(Protocol Data Unit)用于定义数据的类型和源地址,PGN(Parameter Group Number)则指示数据的特定含义。J1939协议还包括连接管理,负责建立和维护网络连接,以及多包传输,允许大数据量的分段传输。
Intel和Motorola报文格式的主要区别在于数据表示方式:Intel格式采用小端模式,数据低位存储在地址较小的位置,而Motorola格式采用大端模式,数据高位存储在低地址。理解这两种格式对于正确解析CAN报文至关重要。
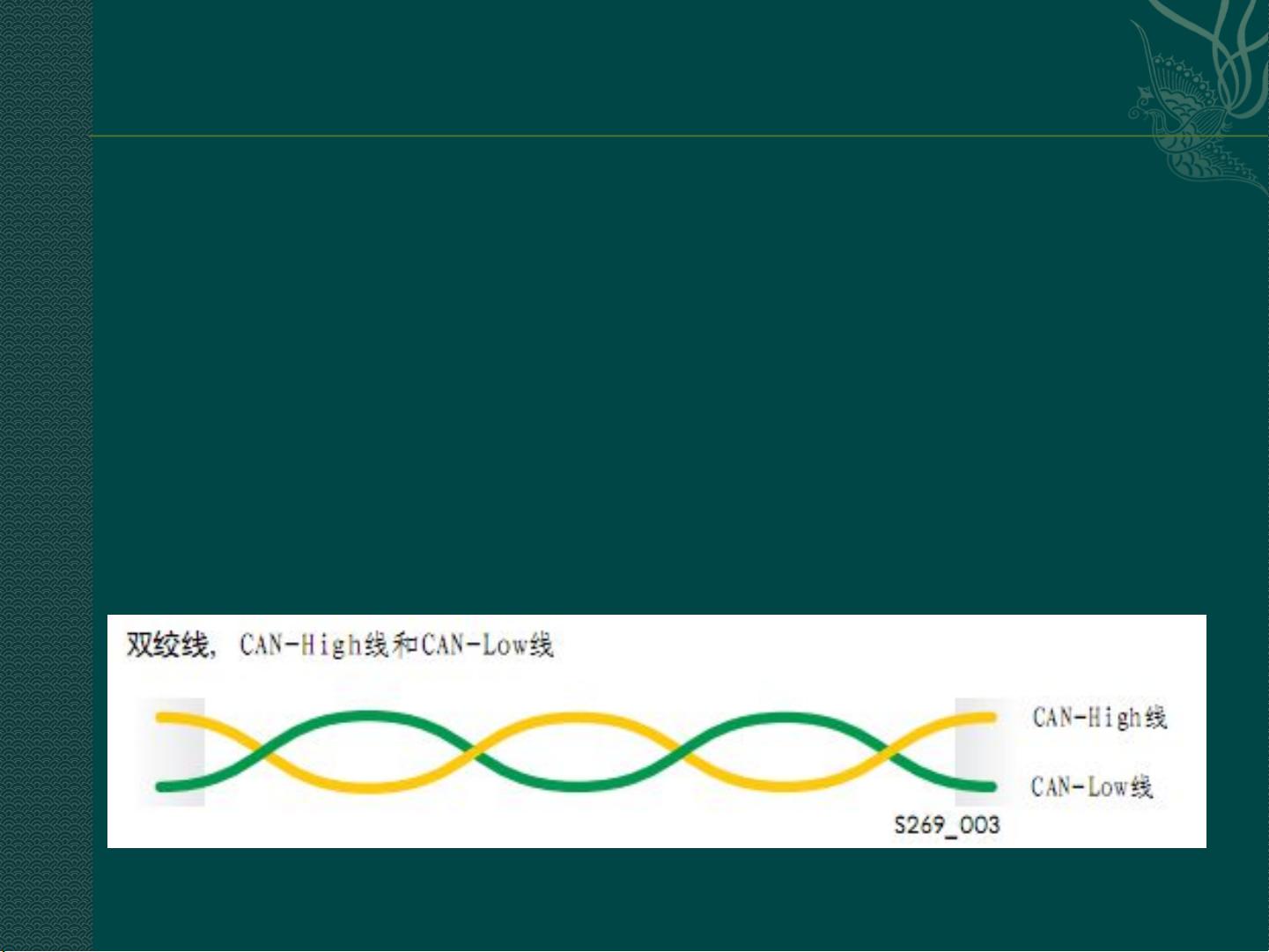
在实际应用中,CAN总线的例子可能涉及汽车中的各种传感器和执行器间的通信,例如通过CAN-High和CAN-Low线交换发动机状态、车速等信息。通过学习和理解CAN协议与J1939协议,工程师可以有效地设计和实施车载通信系统,提升车辆电子设备的集成度和性能。
CAN 总线的特点
CAN 总线是一种串行数据通信协议,其通信接口中集成了 CAN 协议的物理
层和数据链路层功能,可完成对通信数据的成帧处理,包括位填充、数据块编码、
循环冗余检验、优先级判别等项工作。
CAN 总线特点如下:
( 1 )可以多主方式工作,网络上任意一个节点均可以在任意时刻主动地向
网络上的其他节点发送信息,而不分主从,通信方式灵活。
( 2 )网络上的节点(信息)可分成不同的优先级 , 可以满足不同的实时要
求。
( 3 )采用非破坏性位仲裁总线结构机制,当两个节点同时向网络上传送信
息时,优先级低的节点主动停止数据发送,而优先级高的节点可不受影响地
继续传输数据。
( 4 )可以点对点、一点对多点(成组)及全局广播几种传送方式接收数据。
( 5 )直接通信距离最远可达 10km (速率 5Kbps 以下)。
( 6 )通信速率最高可达 1MB/s (此时距离最长 40m )。
( 7 )节点数理论值是 2000 ,实际可达 110 个。

剩余52页未读,继续阅读
2019-05-20 上传
2018-03-01 上传
2018-12-25 上传
2023-06-06 上传
103 浏览量
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情

leee7338
- 粉丝: 12
- 资源: 13
 我的内容管理
展开
我的内容管理
展开







