VisualC++中MCS251单片机与PC串口通信详解及应用
170 浏览量
更新于2024-08-29
收藏 209KB PDF 举报
MCS251单片机与PC机间的串口通信是现代工业控制和自动控制系统中常见的通信方式。本文主要探讨了如何在Visual C++环境下实现这种通信,其中关键环节包括:
1. 基本原理:
串口通信的基础在于异步串行传输,如RS232协议,它允许上位机(PC机)与下位机(单片机)通过一条线路进行双向数据交换。单片机的UART(Universal Asynchronous Receiver/Transmitter,通用异步收发器)负责数据的发送和接收。
2. 通信协议:
PC机与下位机之间的通信遵循特定的协议,例如ASCII或更高级的数据封装格式,确保数据的正确传输。通常,上位机会发送控制指令,而下位机执行这些指令并反馈数据。
3. 环境配置:
在Visual C++中,使用MSComm通信控件是实现串口通信的常用工具。它提供了接口来设置串口的波特率、数据位、停止位、奇偶校验等属性,确保通信参数的一致性。
4. 硬件设计:
单片机与PC机的连接通常采用RS2232或RS2485标准接口。MCS251单片机的串口设计支持全双工通信,即同时进行发送和接收,简化了硬件连接。连接线路上除了TXD、RXD和GND外,可能还包括电源线。
5. 控制代码:
控制代码部分详细描述了如何初始化串口,设置通信参数,以及编写上位机(PC机)的控制逻辑,比如发送指令和读取数据。在接收数据后,上位机可能需要解析数据并进行进一步处理,如显示在波形发生器应用中。
6. 程序流程图:
文章还提供了下位机(单片机)的程序流程图,展示其接收指令、处理数据并回传结果的过程。例如,在波形发生器应用中,下位机可能会根据上位机发送的指令调整正弦波的幅度和频率。
7. 实际应用示例:
文章以一个基于C8051F单片机的波形发生器为例,展示了如何通过串口通信实现上位机对下位机的实时控制,如调整波形的显示参数。
总结来说,本文是一篇关于MCS251单片机与PC机通过串口通信的详细介绍,涵盖了从理论到实践的全过程,对于理解上位机与下位机之间的数据交互具有很高的参考价值。
MCS251单片机和单片机和PC机间的串口通信机间的串口通信
摘 要 概述了PC机与单片机间进行串行口通信的基本原理,介绍了PC机与下位机之间的通信协议,并详述了在
VisualC + +环境下上位机利用MSComm通信控件与单片机之间进行RS232异步串行口通信的实现,给出了实现
通信的硬件设计、串行口属性的初始化、与下位机进行通信的控制代码以及下位机的程序流程图。 随着计
算机技术的快速发展和广泛应用,上位机和下位机的主从工作方式为工业控制及自动控制系统所采用。由于PC
机分析能力强、处理速度更快及单片机使用灵活方便等特点,所以一般都将PC机作为上位机,单片机作为下位
机,二者通过RS2232或者RS2485接收、发送数据和传送指令。单片机可单独处理数据
摘 要 概述了PC机与单片机间进行串行口通信的基本原理,介绍了PC机与下位机之间的通信协议,并详述了在VisualC +
+环境下上位机利用MSComm通信控件与单片机之间进行RS232异步串行口通信的实现,给出了实现通信的硬件设计、串行
口属性的初始化、与下位机进行通信的控制代码以及下位机的程序流程图。
随着计算机技术的快速发展和广泛应用,上位机和下位机的主从工作方式为工业控制及自动控制系统所采用。由于PC机
分析能力强、处理速度更快及单片机使用灵活方便等特点,所以一般都将PC机作为上位机,单片机作为下位机,二者通过
RS2232或者RS2485接收、发送数据和传送指令。单片机可单独处理数据和控制任务,同时也将数据传送给PC机,由PC机对
这些数据进行处理或显示。
本文介绍PC机和单片机通信在一种基于C8051F单片机的波形发生器中的应用,在上位机上显示正弦波的幅值和频率,由
上位机发送指令可以改变波形幅度及频率。
1 硬件电路的设计硬件电路的设计
MCS251 单片机有一个全双工的串行通讯口UART,利用其RXD和TXD与外界进行通信,其内部有2 个物理上完全独立的
接收、发送缓冲器SBUF,可同时发送和接收数据。所以单片机和PC机之间可以方便地进行串口通讯。单片机串口有3条引线:
TXD (发送数据) 、RXD (接收数据)和GND(信号地) .因此在通信距离较短时可采用零MO2DEM方式,简单三连线结
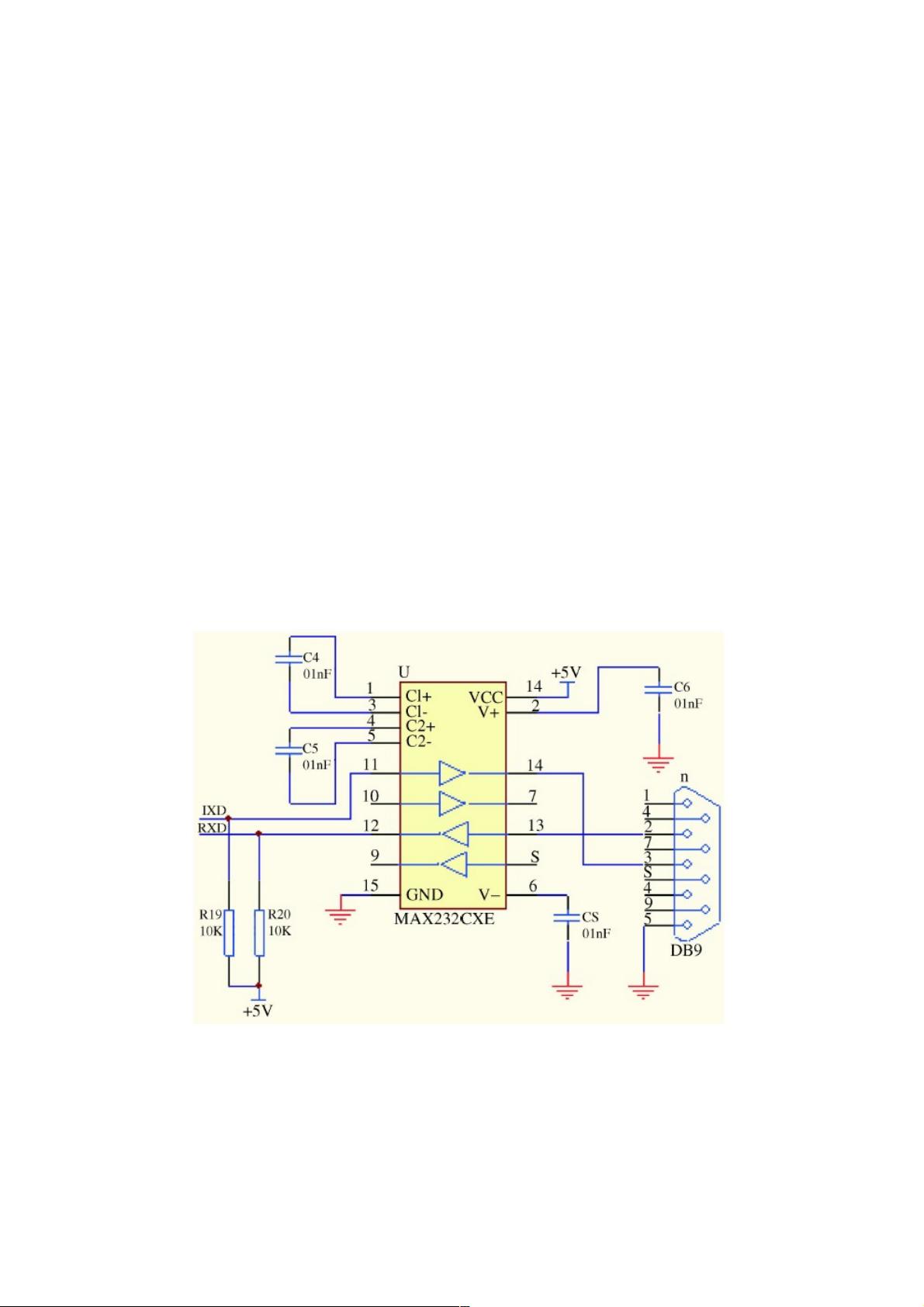
构。IBM2PC机有两个标准的RS2232串行口,其电平采用的是E IA电平,而MCS251单片机的串行通信是由TXD (发送数
据)和RXD (接收数据)来进行全双工通信的,它们的电平是TTL电平;为了PC机与MCS251机之间能可靠地进行串行通
信,需要用电平转换芯片,我们采用了MAXIM公司生产的专用芯片MAX232 进行转换。
电路如图1所示。
图1 转换芯片电路
2 系统软件设计系统软件设计
软件设计分上位机软件设计和下位机软件设计。这两部分虽然在不同的机器上编写和运行,但它们要做的工作是对应的:
一个发送,另一个接收。
为了保证数据通信的可靠性,要制定通信协议,然后各自根据协议分别编制程序。现约定通信协议如下: PC机和单片机
都可以发送和接收。上位机和下位机均采用查询方式发送控字符和数据、中断方式接收控制字符和数据。采用RS2232串口异
步通信,1位起始位, 8位数据位, 1位停止位,无奇偶校验,波特率9 600 b / s.每次PC机向单片机发送数据时,先发送握手
信号"FF",下位单片机收到握手信号则发送应答信号"EE"至PC机,上位PC机收到应答信号后即发送数据。同样,当单片机要向
PC机发送数据时,也先向PC机发联络信号"EB90",PC机收到联络信号后发应答信号"EBOO",单片机收到应答信号后则发送数
下载后可阅读完整内容,剩余3页未读,立即下载
2008-04-23 上传
2009-02-08 上传
2020-10-21 上传
2020-08-18 上传
2009-09-18 上传
点击了解资源详情
点击了解资源详情
2012-10-22 上传

weixin_38708461
- 粉丝: 5
- 资源: 993
 我的内容管理
展开
我的内容管理
展开







最新资源
- C语言数组操作:高度检查器编程实践
- 基于Swift开发的嘉定单车LBS iOS应用项目解析
- 钗头凤声乐表演的二度创作分析报告
- 分布式数据库特训营全套教程资料
- JavaScript开发者Robert Bindar的博客平台
- MATLAB投影寻踪代码教程及文件解压缩指南
- HTML5拖放实现的RPSLS游戏教程
- HT://Dig引擎接口,Ampoliros开源模块应用
- 全面探测服务器性能与PHP环境的iprober PHP探针v0.024
- 新版提醒应用v2:基于MongoDB的数据存储
- 《我的世界》东方大陆1.12.2材质包深度体验
- Hypercore Promisifier: JavaScript中的回调转换为Promise包装器
- 探索开源项目Artifice:Slyme脚本与技巧游戏
- Matlab机器人学习代码解析与笔记分享
- 查尔默斯大学计算物理作业HP2解析
- GitHub问题管理新工具:GIRA-crx插件介绍
