AT89C52单片机驱动的复杂路线寻迹机器人设计
25 浏览量
更新于2024-08-30
收藏 264KB PDF 举报
"工业电子中的复杂路线下机器人的三点三轮寻迹系统"着重探讨了如何设计一个能够应对复杂路线的智能寻迹机器人。在这个系统中,机器人采用了三点三轮的配置,这通常意味着机器人有三个驱动轮,其中两个位于机器人的一侧,另一个位于另一侧,这种布局有助于提高稳定性和转向灵活性。
描述中提到,寻迹机器人主要应用于各类竞赛,如"飞思卡尔"杯全国大学生智能车大赛和亚广联(ABU)机器人大赛,这些比赛对机器人的寻迹能力和路径适应性有着严格的要求。复杂路线指的是包含小半径弯道、各种角度的折道以及直道的不规则路径,这对机器人的导航能力提出了挑战。
在硬件设计部分,控制器选用了AT89C52单片机,这是一款基于8051架构的微处理器,拥有8KB的闪存和256B的RAM,支持多种I/O端口和定时/计数器功能,适合用于控制任务。AT89C52因其低功耗、高性能和良好的性价比而成为许多嵌入式应用的理想选择。
传感器模块是实现自主寻迹的关键。尽管CCD传感器在精度和性能上有优势,但考虑到成本和数据处理的复杂性,这里选择了红外光电传感器。这种传感器由红外发射管和光敏元件组成,通过检测反射回来的红外光强度来判断机器人与路径之间的距离,从而调整行驶方向。
红外光电传感器的简易性和成本效益使其成为复杂路线寻迹的首选。机器人利用三个传感器,可能布置在车身的前端,形成三角形布局,这样可以更精确地检测到路径的边缘,帮助机器人实时调整行驶轨迹,确保在各种复杂的路径条件下都能保持在预设路线上。
通过AT89C52单片机接收并处理传感器的数据,机器人能够实时分析路况,通过PID(比例-积分-微分)算法或类似的控制策略来调整电机的转速和方向,实现精准的路径跟踪。此外,单片机还可以实现其他功能,如障碍物检测、速度控制和电源管理等,以确保机器人的稳定运行。
总结来说,这个工业电子中的复杂路线下机器人的三点三轮寻迹系统展示了如何结合硬件选择、传感器应用和智能控制策略,设计出一款能在复杂环境中有效导航的智能机器人。它不仅在技术上体现了电子工程的创新,还在实际应用中展现了其广泛的可能性和价值。
工业电子中的复杂路线下机器人的三点三轮寻迹系统工业电子中的复杂路线下机器人的三点三轮寻迹系统
引 言 智能寻迹机器人是一种被广泛研究的机器人,而且国内外都有许多重要的比赛都以寻迹机器人为核心
展开,如我国的“飞思卡尔”杯全国大学生智能车大赛,以及吸引亚太地区众多国家参赛的亚广联(ABU)机器人大
赛等。 所谓的复杂路线,即由小半径弯道、各种角度折道、直道等组成的不规则导引线,它是相对由大半
径弯道组成、过渡平滑的简单路线而言的。笔者所设计的寻迹机器人小车,以AT89C52单片机为控制芯片,采
用自制的3个红外光电传感器,以简单的设计、较低的成本实现了复杂路线下机器人的自主寻迹。 1 硬件及
电路 1.1 控制芯片 考虑到实用性和性价比,采用AT89C52单片机作为机
引 言
智能寻迹机器人是一种被广泛研究的机器人,而且国内外都有许多重要的比赛都以寻迹机器人为核心展开,如我国的“飞
思卡尔”杯全国大学生智能车大赛,以及吸引亚太地区众多国家参赛的亚广联(ABU)机器人大赛等。
所谓的复杂路线,即由小半径弯道、各种角度折道、直道等组成的不规则导引线,它是相对由大半径弯道组成、过渡平滑
的简单路线而言的。笔者所设计的寻迹机器人小车,以AT89C52单片机为控制芯片,采用自制的3个红外光电传感器,以简单
的设计、较低的成本实现了复杂路线下机器人的自主寻迹。
1 硬件及电路
1.1 控制芯片
考虑到实用性和性价比,采用AT89C52单片机作为机器人的控制芯片。AT89C52是美国Atmel公司生产的低电压、高性
能CMOS 8位单片机,片内含8 KB的可反复擦写的只读存储器(PEROM)和256B的随机存取数据存储器(RAM),32个I/O口
线,3个16位定时/计数器,1个全双工串行通行口。器件采用Atmel公司的高密度、非易失性存储技术生产,与标准MCS-51
指令系统及8052产品引脚兼容。
1.2 传感器模块
作为寻迹机器人的“眼睛”,选择合适的传感器是关键。目前市面上可选用的传感器主要有CCD传感器和红外光电传感器两
种。近年来CCD传感器技术已趋成熟,在近几届“飞思卡尔”杯智能车大赛上,采用CCD传感器的智能车越来越多,并取得了不
错的成绩。不过,CCD传感器价格较高,体积较大,数据处理相当复杂,因此在按既定路线行走的寻迹机器人设计中,红外
光电传感器以其体积小、价格低、数据处理简单而显得更有优势。
红外光电传感器由1个红外发射管和1个光敏二极管组成。工作时,红外发射管发射的红外光被被测表面反射回来,光敏
二极管接收被反射光。由于被测表面的材质不同,反射率也不一样。当被测表面为白色时,反射光较强,光敏二极管将导通;
反之,被测表面为黑色时,光敏二极管将截止。考虑到外界环境光照等干扰因素,输出的电压值有一定的波动范围,若直接输
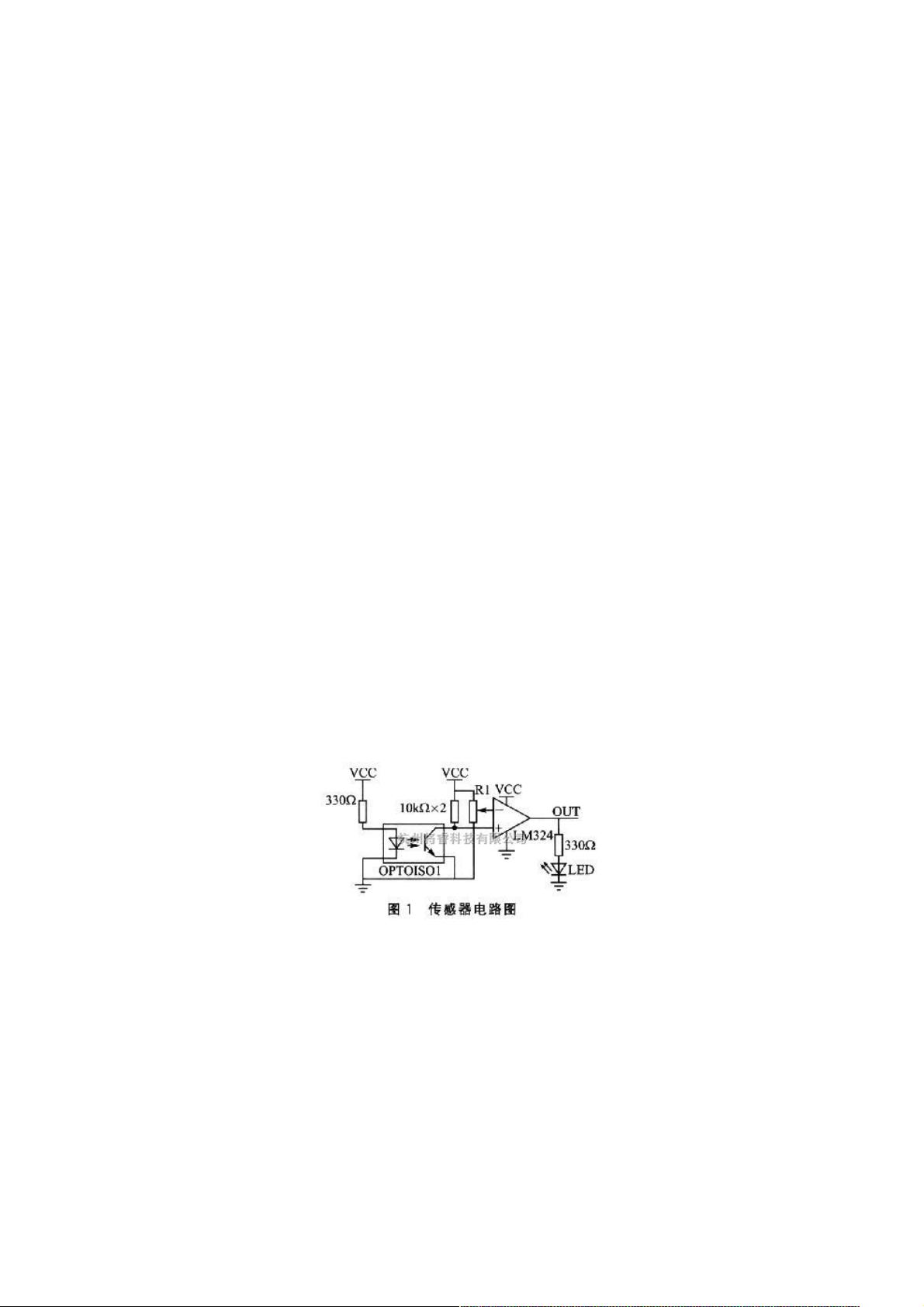
给单片机,可能导致检测判断错误。因此,需要将输出电压通过比较器(LM324)与预置的阈值电压比较,然后得出一个高低电
平输给单片机。阈值电压通过试验测量得出,其电路如图1所示。其中LED为传感器工作指示灯,R1为阈值电压调节电阻。
根据上述电路,自制了3个简易的红外光电传感器。经测试表明,性能良好,有效检测距离为1~4 cm,满足机器人寻迹
的要求。
1.3 驱动模块
驱动机器人行走的2个电机需要不同的转速来实现转弯。选用的驱动芯片为L293D,它包含4个输出通道,最大输出峰值
电流为1.2 A,能同时驱动2个直流电机工作;其信号输入端和使能端接收到来自单片机的信号,控制电机的通断以及正、反
转,还可以通过向使能端输入不同占空比的方波信号来调整电机转速(PWM方式)。如图2所示,IN端口接控制信号,OUT端口
接电机的两端,EN端口接使能信号。一组IN端口输入为高/低或低/高电平时,能实现电机的正/反转。一组IN端口输入均
为高或低电平时,电机将停转。EN使能端为高电平时,相应端口输入信号有效;反之,则输入信号无效。在EN 端输入PWM
波,通过调整PWM波的占空比,即可实现电机的无级调速。
下载后可阅读完整内容,剩余3页未读,立即下载
2011-05-02 上传
2022-06-19 上传
2023-02-06 上传
2023-06-09 上传
2023-06-12 上传
2023-09-21 上传
2023-05-10 上传
2024-02-01 上传
2024-08-31 上传

weixin_38611877
- 粉丝: 4
- 资源: 925
 我的内容管理
展开
我的内容管理
展开







最新资源
- 前端面试必问:真实项目经验大揭秘
- 永磁同步电机二阶自抗扰神经网络控制技术与实践
- 基于HAL库的LoRa通讯与SHT30温湿度测量项目
- avaWeb-mast推荐系统开发实战指南
- 慧鱼SolidWorks零件模型库:设计与创新的强大工具
- MATLAB实现稀疏傅里叶变换(SFFT)代码及测试
- ChatGPT联网模式亮相,体验智能压缩技术.zip
- 掌握进程保护的HOOK API技术
- 基于.Net的日用品网站开发:设计、实现与分析
- MyBatis-Spring 1.3.2版本下载指南
- 开源全能媒体播放器:小戴媒体播放器2 5.1-3
- 华为eNSP参考文档:DHCP与VRP操作指南
- SpringMyBatis实现疫苗接种预约系统
- VHDL实现倒车雷达系统源码免费提供
- 掌握软件测评师考试要点:历年真题解析
- 轻松下载微信视频号内容的新工具介绍
