超声波测距技术在机器人导航中的应用
需积分: 9 201 浏览量
更新于2024-09-06
收藏 124KB DOCX 举报
"超声波测距技术在机器人中的应用,主要介绍了一个基于超声波的三方测距系统,用于机器人避障和导航。系统利用LabVIEW相关的电子电路设计,核心是PIC16F877单片机,通过软件编程实现超声波的发射和接收,以判断机器人周围环境的障碍物情况。"
在自主行走机器人系统中,超声波测距技术扮演着关键角色,因为它能够提供实时的环境信息,帮助机器人避障和定位。超声波传感器因其设备简单、成本低、体积小、设计灵活以及能在一定程度上满足工业应用的精度要求,而被广泛采用。本文重点讲解的三方超声波测距系统通过探测机器人前方、左方和右方的距离,为机器人导航提供了关键数据。
超声波测距的基本原理基于超声波的发生和接收。压电片在特定频率的电信号驱动下产生振动,发射超声波。当接收到反射回来的超声波时,它又作为接收器工作。测距通常有两种方式:一是根据输出电压与距离成正比来计算;二是通过测量发射和接收超声波之间的时间差,结合声速来确定距离。考虑到温度对声速的影响,系统可能需要进行温度补偿。本文所描述的系统采用第二种方法,假设温度恒定,简化了设计。
硬件电路设计以PIC16F877单片机为核心,该单片机能生成40kHz的超声波信号,并通过软件控制发射和接收过程。发射电路中,单片机的RA0口产生超声波信号,但只有当开关S1闭合时,4kHz的门控信号从RA1口发出,启动定时器TMR1,超声波发射器发射10个完整波形。这种设计使得系统能有效控制超声波的发射和接收。
系统并不需要精确的距离读数,而是设定一个距离阈值,当检测到障碍物接近这个阈值时,单片机会控制电机停止,避免碰撞。因此,系统没有配备显示电路,所有处理都在单片机内部完成,简化了整体架构并提高了移植性。
超声波测距技术在机器人领域有着重要的应用,通过巧妙的硬件设计和软件控制,可以构建出高效、可靠的避障系统。LabVIEW作为强大的图形化编程工具,可能在系统开发过程中起到了关键的支持作用,提供了一个直观的界面来设计和调试电子电路。
超声波测距电子电路设计详解
在自主行走机器人系统中,机器人要实现在未知和不确定环境下行走,必须实时采集环
境信息,以实现避障和导航,这必须依靠能实现感知环境信息的传感器系统来实现。视觉、
红外、激光、超声波等传感器都在行走机器人中得到广泛应用。由于超声波测距方法设备
简单、价格便宜、体积小、设计简单、易于做到实时控制,并且在测量距离、测量精度等
方面能达到工业实用的要求,因此得到了广泛的应用。本文所介绍的机器人采用三方超声
波测距系统,该系统可为机器人识别其运动的前方、左方和右方环境而提供关于运动距离
的信息。
超声波测距原理
超声波发生器内部由两个压电片和一个共振板组成。当它的两极外加脉冲信号,且其
频率等于压电晶片的固有振荡频率时,压电晶片将会发生共振,并带动共振板振动,便产
生超声波。反之,如果两极间未加外电压,当共振板接收到超声波时,就成为超声波接收
器。超声波测距一般有两种方法:①取输出脉冲的平均电压值,该电压与距离成正比,测
量电压即可测量距离;②测量输出脉冲的宽度,即发射超声波与接收超声波的时间间隔
t,根据被测距离 s=vt?2 来得到测量距离,由于超声波速度 v 与温度有关,所以如果温
度变化比较大,应通过温度补偿的方法加以校正。
本测量系统采用第二种方法,由于测量精度要求不是特别高,所以可以认为温度基本
不变。本系统以 PIC16F877($4.6800)单片机为核心,通过软件编程实现其对外围电路
的实时控制,并提供给外围电路所需的信号,包括频率振动信号、数据处理信号等,从而
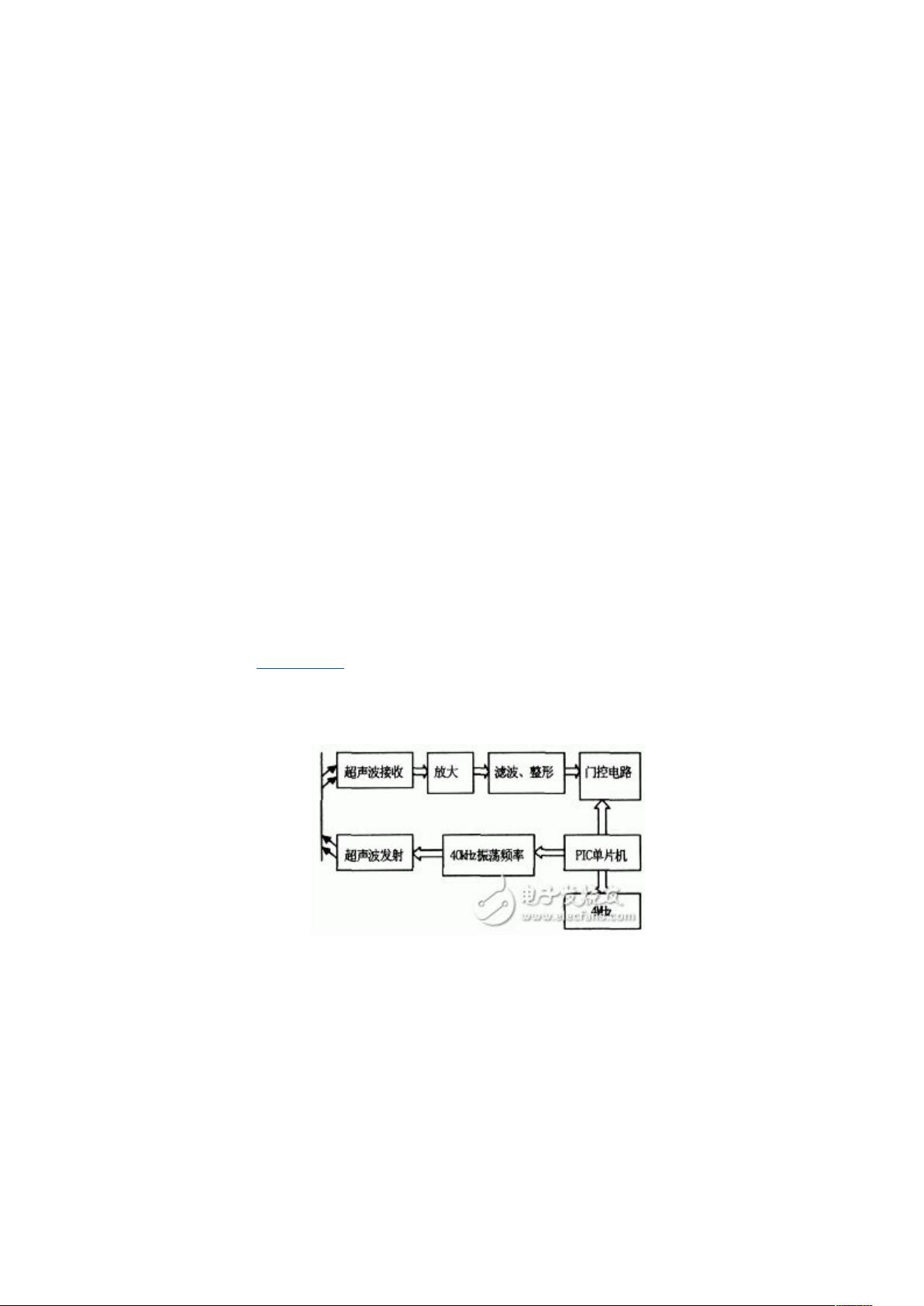
简化了外围电路,且移植性好。系统硬件电路方框图见图 1。
图 1 系统硬件电路方框图
由于本系统只需要清楚机器人前方、左方、右方是否有障碍物,并不需要知道障碍物
与机器人的具体距离,因此不需要显示电路,只需要设定一距离阀值,使障碍物与机器人
的距离达到某一值时,单片机控制机器人电机停转,这可通过软件编程实现。
超声波发射电路
下载后可阅读完整内容,剩余3页未读,立即下载
点击了解资源详情
点击了解资源详情
点击了解资源详情
2022-12-17 上传
2022-11-29 上传
2020-05-08 上传
2022-07-03 上传
2022-12-17 上传
2022-11-10 上传

weixin_38743481
- 粉丝: 698
- 资源: 4万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 2019年中国研究生数学建模竞赛E题,2019年第十六届中国研究生数学建模竞赛C题,matlab
- gandalfe-lang:gandalfe-lang用于JavaScript的新语言翻译
- 定时结构-综合文档
- shangfan(商范商城H5+PC) v1.1.1.zip
- PostgrEX
- hand_animation:使用Mediapipe API和Blender生成手部动画
- Hackday-Real-Time-Elastic-Search:实现实时弹性搜索接口
- 毕业设计-超市管理系统(django).zip
- C++中国象棋,c++中国象棋源代码,C/C++
- 基于Python实现将PDF文件转存为图片
- Kopete Antispam-开源
- MyTransitGuide-crx插件
- 循环结构的反馈节点-综合文档
- Het Slackware Handboek-开源
- 飞蛾扑火,飞蛾扑火歌曲原唱,matlab
- lec-PPT
