Minimum Snap轨迹规划入门:构建优化问题与约束
需积分: 1 61 浏览量
更新于2024-08-05
1
收藏 605KB PDF 举报
Minimum Snap轨迹规划是一种在机器人控制中常用的高级运动规划技术,它着重于生成平滑且满足特定约束条件的轨迹。轨迹规划在机器人领域中扮演着关键角色,因为它确保了机器人从一个位置安全、高效地移动到另一个位置。
首先,轨迹规划包括两个主要步骤:路径规划和轨迹规划。路径规划是在地图上找到从起始点A到目标点B的一系列离散空间点,这些点构成了一条可能的路线。然而,由于路径可能不够平滑,需要进行轨迹规划,将这些稀疏的路径点转化为连续且可控制的轨迹。
轨迹通常用n阶多项式来描述,例如,一个二阶多项式(线性+余弦)可以表示位置、速度和加速度的变化。但现实中,复杂轨迹可能无法用单一多项式精确描述,因此会将其划分为多个子段,每个子段用独立的多项式表示。目标是找到一组参数,使得轨迹既满足约束条件,如起点、终点的定位和速度限制,又在连接点间具有平滑过渡。
Minimum Snap轨迹规划的核心在于构造一个优化问题,通过最小化Snap(加加加速度)来找到最优的轨迹。Snap作为指标,反映了轨迹的瞬时变化率,它的优化有助于减少机器人的振动和冲击。当然,还可以选择最小化加速度或Jerk,但通常速度不是优化目标,因为这可能会导致不必要的能量消耗。
优化过程涉及定义目标函数和约束条件,将这些转化为数学模型,然后使用数值优化算法(如梯度下降、遗传算法等)来求解。目标函数可能还包括其他性能指标,如路径长度、能耗等,以实现综合考虑下的最优解决方案。
总结来说,Minimum Snap轨迹规划是通过数学建模和优化技术,寻找在满足多种约束条件下的最优轨迹,以实现机器人在执行任务时的平稳运动和高效性能。这种技术广泛应用于工业自动化、无人机控制、自动驾驶等领域,是现代机器人控制中不可或缺的一部分。
Minimum Snap轨迹规划详解
(1)轨迹规划入门
1. 轨迹规划是什么?
在机器人导航过程中,如何控制机器人从A点移动到B点,通常称之为运动规划。运动规划一般又分为
两步:
1. 路径规划:在地图(栅格地图、四\八叉树、RRT地图等)中搜索一条从A点到B点的路径,由一系
列离散的空间点(waypoint)组成。
2. 轨迹规划:由于路径点可能比较稀疏、而且不平滑,为了能更好的控制机器人运动,需要将稀疏的
路径点变成平滑的曲线或稠密的轨迹点,也就是轨迹。
2. 轨迹是什么?
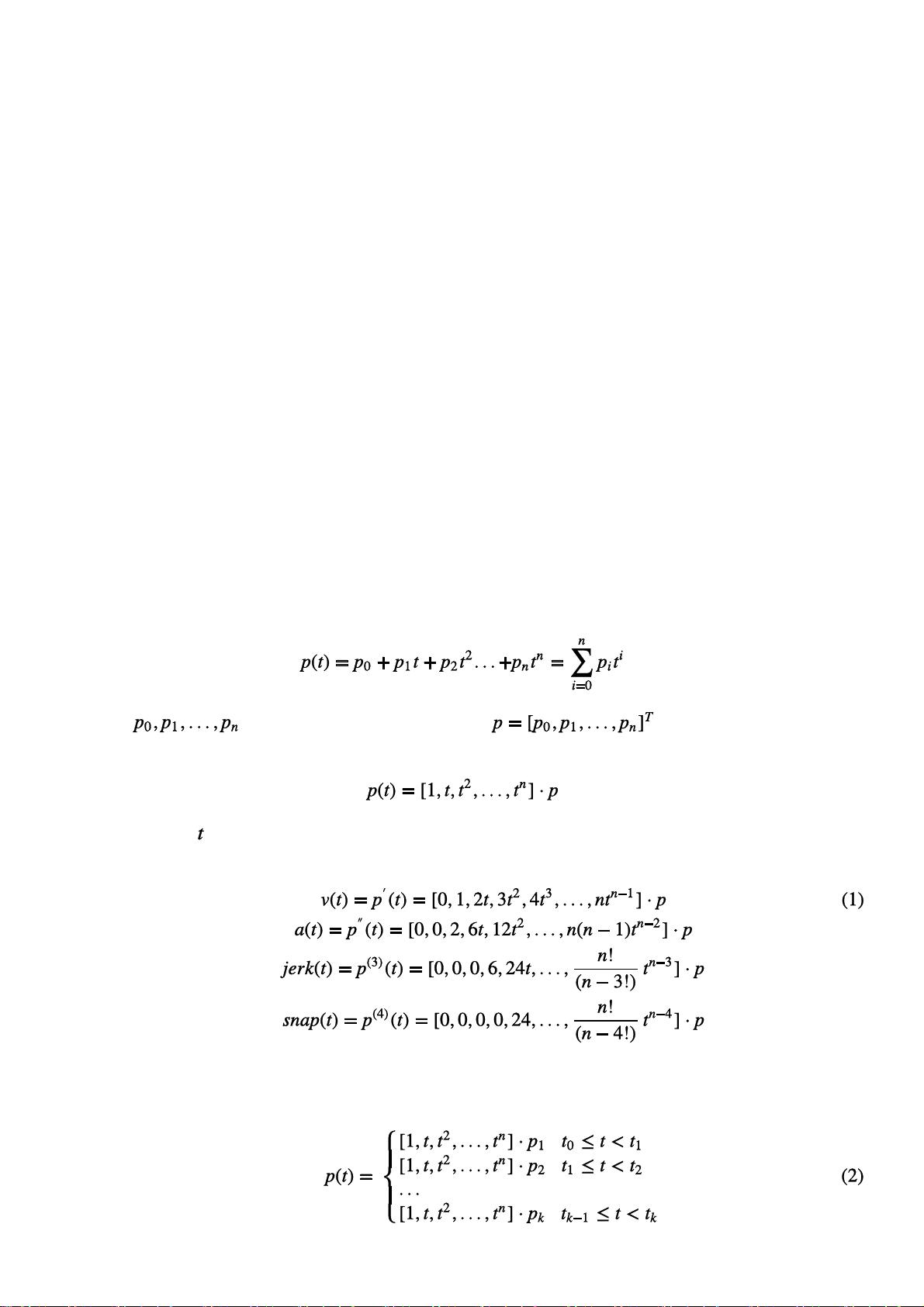
轨迹一般用n阶多项式(polynomial)来表示,即
其中 为轨迹参数(n+1个),设参数向量 ,则轨迹可以写成向量
形式,
对于任意时刻 ,可以根据参数计算出轨迹的位置P(osition),速度V(elocity),加速度A(cceleration),
jerk,snap等。
一个多项式曲线过于简单,一段复杂的轨迹很难用一个多项式表示,所以将轨迹按时间分成多段,每段
各用一条多项式曲线表示,形如:
下载后可阅读完整内容,剩余6页未读,立即下载
2022-08-04 上传
2022-08-08 上传
2024-08-13 上传
2024-05-25 上传
点击了解资源详情
2024-03-05 上传

嗨,早啊!
- 粉丝: 2
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- 掌握压缩文件管理:2工作.zip文件使用指南
- 易语言动态版置入代码技术解析
- C语言编程实现电脑系统测试工具开发
- Wireshark 64位:全面网络协议分析器,支持Unix和Windows
- QtSingleApplication: 确保单一实例运行的高效库
- 深入了解Go语言的解析器组合器PARC
- Apycula包安装与使用指南
- AkerAutoSetup安装包使用指南
- Arduino Due实现VR耳机的设计与编程
- DependencySwizzler: Xamarin iOS 库实现故事板 UIViewControllers 依赖注入
- Apycula包发布说明与下载指南
- 创建可拖动交互式图表界面的ampersand-touch-charts
- CMake项目入门:创建简单的C++项目
- AksharaJaana-*.*.*.*安装包说明与下载
- Arduino天气时钟项目:源代码及DHT22库文件解析
- MediaPlayer_server:控制媒体播放器的高级服务器
