




基于51单片机的自动巡线机器人控制系统实现
194 浏览量
更新于2024-08-27
收藏 341KB PDF 举报
"本文主要介绍了基于51型单片机设计的自动巡线轮式机器人的控制系统,该系统包括主控制电路模块、存储器模块、光电检测模块和电机及舵机驱动模块。通过CPLD扩展来减轻单片机的负担,实现更高效的电机控制和信号处理。"
在轮式移动机器人研究中,单片机自动巡线技术是一项关键应用,它综合运用了机械工程、电子技术、传感器检测和智能控制策略。轮式移动机构因其易于控制移动速度和方向而被广泛应用。设计一个完整的轮式机器人系统,能够进行精确的运动规划和控制算法研究,具有重要的实践意义。
控制系统由多个模块构成,包括主控制电路模块,这是整个系统的中枢,负责处理各种指令和数据;存储器模块,用于存储程序和数据;光电检测模块,用于识别路径线条,确保机器人准确沿预设线路行驶;以及电机及舵机驱动模块,它们是执行机构,驱动机器人前进、转向。
主控制模块的核心是3.1节提到的CPLD(复杂可编程逻辑器件),型号EPM7128,它扩展了单片机的功能,处理电机控制和光电检测等任务。CPLD通过产生PWM(脉冲宽度调制)信号控制电机速度,并通过专用I/O口实现电机方向的切换。同时,它还接收来自光电探头和行程开关的输入信号,这些信号经过处理后反馈给单片机,以便实时调整机器人的行驶状态。
在硬件设计中,CPLD的引脚布局和编程至关重要。例如,EPM7128的M1P-M4P引脚输出PWM信号,M1FB-M4FB引脚控制电机方向,而P00-P07接口连接到单片机的PO口,用于数据传输。通过VHDL语言编程,可以定制CPLD的行为,例如产生PWM信号的代码段,进一步优化电机控制的精度和响应速度。
这个自动巡线轮式机器人控制系统利用51型单片机和CPLD实现了高效、精确的运动控制,结合光电检测技术,能够在复杂的环境中自主导航,展现了轮式机器人在自动化领域的潜力。这种设计思路对后续的机器人控制系统设计具有重要的参考价值。
单片机自动巡线轮式机器人控制系统设计单片机自动巡线轮式机器人控制系统设计
轮式移动机器人是机器人研究领域的一项重要内容.它集机械、电子、检测技术与智能控制于一体。在各种移
动机构中,轮式移动机构为常见。轮式移动机构之所以得到广泛的应用。主要是因为容易控制其移动速度和移
动方向。因此.有必要研制一套完整的轮式机器人系统。并进行相应的运动规划和控制算法研究。笔者设计和
开发了基于51型单片机的自动巡线轮式机器人系统。 2 控制系统总体设计 机器人控制系统由主控制电
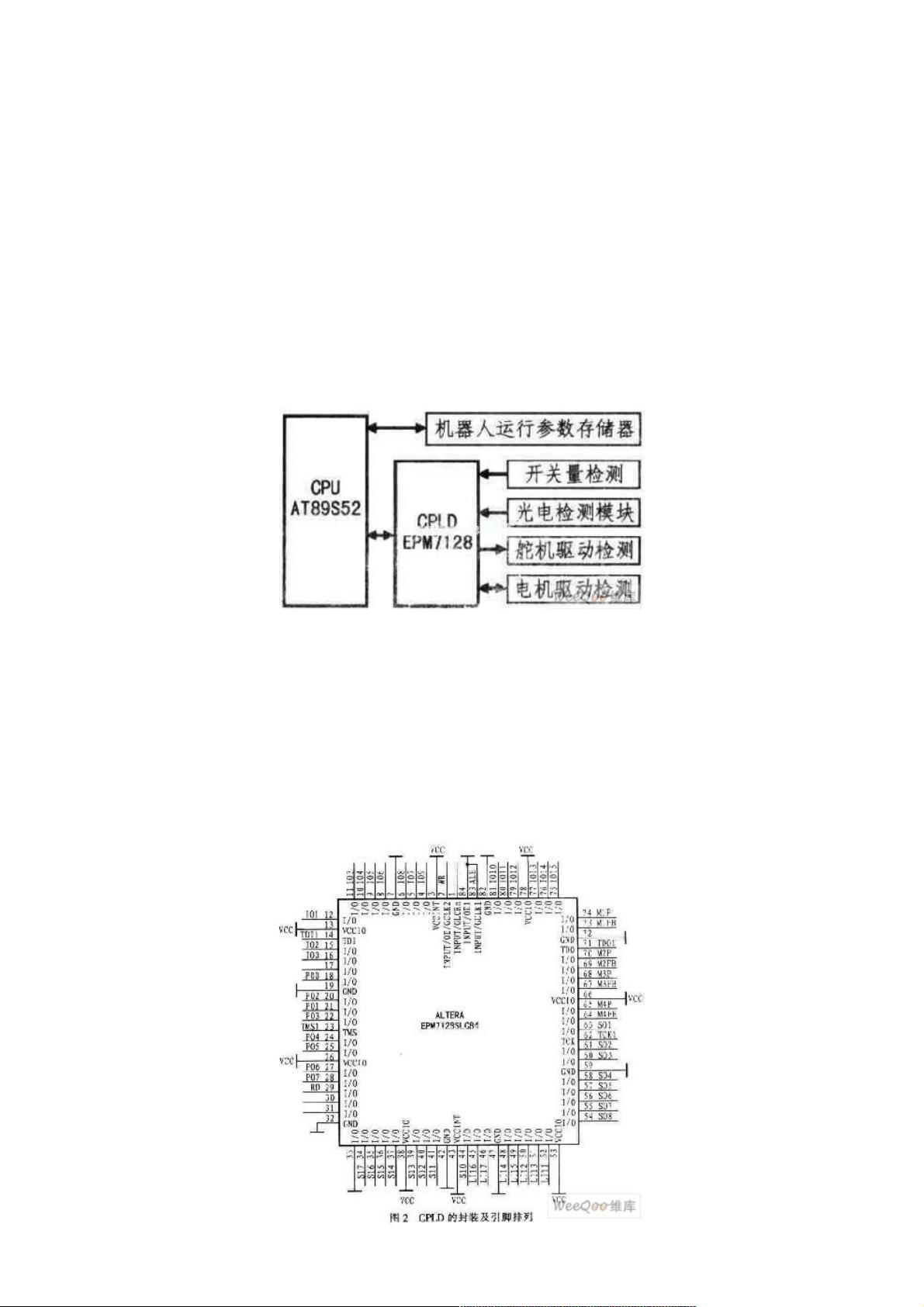
路模块、存储器模块、光电检测模块、电机及舵机驱动模块等部分组成,控制系统的框图如图1所示。 控制
系统的框图 3 主控制模块设计 3.1 CPLD设计 在机器人控制系统中
轮式移动机器人是机器人研究领域的一项重要内容.它集机械、电子、检测技术与智能控制于一体。在各种移动机构中,
轮式移动机构为常见。轮式移动机构之所以得到广泛的应用。主要是因为容易控制其移动速度和移动方向。因此.有必要研制
一套完整的轮式机器人系统。并进行相应的运动规划和控制算法研究。笔者设计和开发了基于51型单片机的自动巡线轮式机
器人系统。
2 控制系统总体设计
机器人控制系统由主控制电路模块、存储器模块、光电检测模块、电机及舵机驱动模块等部分组成,控制系统的框图如图
1所示。
控制系统的框图
3 主控制模块设计
3.1 CPLD设计
在机器人控制系统中.需要控制多个电动机和行程开关.还要进行光电检测.如果所有的任务都由AT89S52型单片机来
完成.CPU的负担就会过重。影响系统的处理速度。因此扩展1个CPLD.型号为 EPM7128。它属于.MAX7000系列器件。
包括2个通用1/0口.2个专用I/O口,专用I/O口可作为每个宏单元和输入输出引脚的高速控制信号 (时钟、清除和输出使能
等),电动机的。PWM信号也由其产生。
下载后可阅读完整内容,剩余3页未读,立即下载
181 浏览量
195 浏览量
141 浏览量
111 浏览量
186 浏览量
2021-09-25 上传
132 浏览量
445 浏览量
2020-08-31 上传

weixin_38677725
- 粉丝: 5
 我的内容管理
展开
我的内容管理
展开







最新资源
- Cassinipp:无需安装IIS的便捷Web服务程序
- 同济第五版高等数学课本及章节答案下载
- MageSpec Magento PHP Spec工具的安装与使用
- 深入理解词法分析器的原理与应用
- 提升效率:终极输入法设置与优化工具
- STLinkV2.J28.M18固件升级及应用指南
- HTML5 canvas打造3D雪花飘落特效插件
- MySQL官方简体中文参考手册:全面数据库管理指南
- 掌握NPAPI:创建基础Firefox插件示例
- SJCL加密解密工具:页面JS实现方案
- IBM数据科学课程:完成课程10的最终项目
- 首次适应算法在操作系统课程设计中的应用分析
- C#实现的自定义图片九宫格拼图游戏
- 全屏滑动图片布局:HTML5 Flexbox网格设计
- STM32F4平台下MPU9250驱动优化与磁力计椭球拟合实例
- 谷歌地图坐标的纠偏加偏小工具使用指南






















