3D旋转与万向节死锁:欧拉角解析
需积分: 31 5 浏览量
更新于2024-09-09
2
收藏 115KB PDF 举报
"万向节死锁 (Krasjet) 是一种在3D空间中使用欧拉角表示旋转时可能出现的问题。文章详细介绍了万向节死锁的现象、产生原因,并指出欧拉角在特定情况下的局限性。"
万向节死锁,也称为Gimbal Lock,是3D图形学和飞行模拟等领域中一个常见的问题,它发生在使用欧拉角表示物体旋转时。欧拉角由三个独立的旋转组成,通常称为yaw(偏航)、pitch(俯仰)和roll(翻滚),分别围绕Z、Y和X轴进行。这种表示方式在大多数情况下工作良好,但在特定序列的旋转后,可能会导致两个旋转轴对齐,从而失去一个自由度,使得无法独立控制所有三个轴的旋转。
例如,当一个物体首先围绕Z轴(yaw)旋转,然后围绕新的Y轴(即经过yaw旋转后的Y轴,也称为偏航轴)进行pitch旋转时,如果pitch角度达到90度,原本的X轴和Z轴就会重合。此时,再试图进行roll(围绕X轴)旋转,实际上会影响yaw或pitch,而不是独立地改变roll。这种情况就导致了“死锁”,因为旋转轴之间的正交关系被破坏,无法独立地控制所有三个旋转。
欧拉角在许多领域中被广泛使用,包括游戏开发、航空航天工程等,但其固有的万向节死锁问题限制了其在某些复杂旋转场景中的应用。为了解决这个问题,人们引入了其他旋转表示方法,如四元数。四元数避免了万向节死锁,提供了一种更连续、无歧义的方式来表示3D旋转,通过一个四维复数来描述旋转,即使在连续旋转后也能保持各个旋转轴的独立性。
在理解万向节死锁时,理解旋转矩阵的性质至关重要。每个旋转矩阵Rx、Ry和Rz都是正交的,且它们的逆矩阵等于它们的转置。这意味着每次旋转都是一个线性变换,可以将一个坐标系旋转到另一个坐标系。当这些矩阵相乘时,它们代表的旋转顺序是从右到左,即先执行最右边的旋转,然后依次向左。
为了避免万向节死锁,开发者可以选择使用四元数或其他替代方案,如轴角表示法,来更稳定地处理3D旋转。尽管欧拉角在直观性和易用性上有其优势,但在需要精确控制和避免意外旋转耦合的场合,使用四元数往往更为合适。
万向节死锁是3D旋转表示的一个重要问题,特别是在需要连续和精确控制物体朝向的场景下。理解这个问题以及如何通过四元数等方法来避免它,对于从事3D图形编程和相关技术的人来说是至关重要的。
Bonus: Gimbal Lock
Krasjet
(这个 Bonus 章节是由我很久之前的笔记修改而成,所以有些概念没有从头开始介
绍,但对理解应该不会造成太大的困难.如果你想了解的是四元数的相关知识,请点
击这里)
在这里,我会简单介绍一下使用欧拉⻆表示 3D 朝向 (Orientation) 或者旋转时
Gimbal Lock(通常译为万向锁或者万向节死锁)的产生原因.虽然这方面的资料很
多,但是某些解释可能会让人比较费解(比如 Wikipedia 上那个球型 Gimbal 的动画),
有时候直接从数学上来理解反而会更直观一点.和四元数的教程一样,我们在这里
使用的也是右手坐标系.
0.1 欧拉⻆
在介绍 Gimbal Lock 之前,我们需要先了解朝向和旋转的欧拉⻆表示方法.因为欧
拉⻆的资料有很多,我不会从它的最基础讲起.如果你不了解什么是欧拉⻆,在继续
阅读之前可以先读一下欧拉⻆的 Wikipedia.
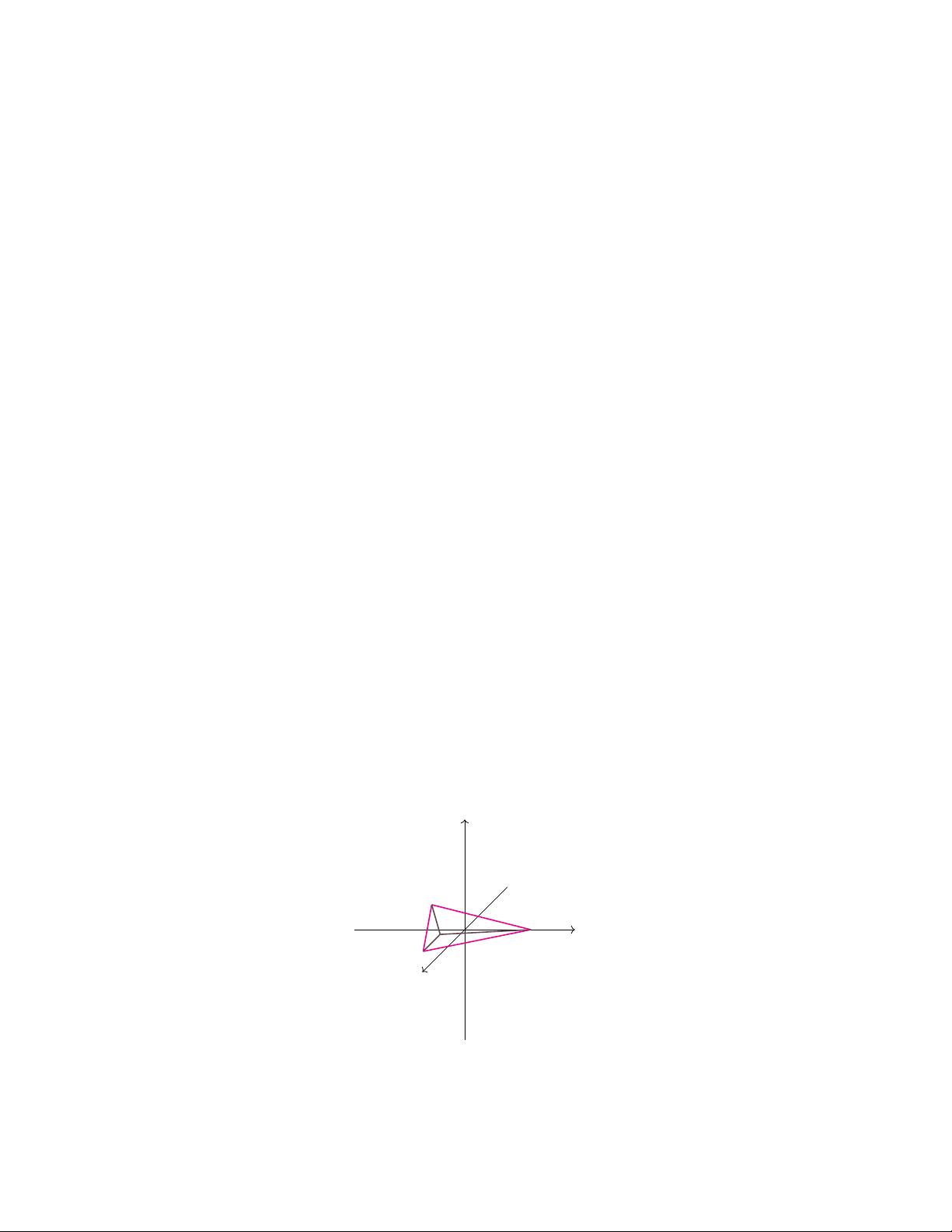
首先,假设我们有一个物体,我们使用三个互相正交的坐标轴对它建立一个坐标系:
y
z
x
现在,我们的目标就是能改变这个物体的朝向.有一点需要注意的是,朝向
(Orientation) 和方向 (Direction) 虽然看起来很像,但是它们是完全不同的两个概念.
1
下载后可阅读完整内容,剩余4页未读,立即下载
123 浏览量
136 浏览量
158 浏览量
203 浏览量
2025-01-06 上传
130 浏览量
4080 浏览量
2025-02-25 上传
2023-05-17 上传

jieohsong
- 粉丝: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- Verilog实现的Xilinx序列检测器设计教程
- 九度智能SEO优化软件新版发布,提升搜索引擎排名
- EssentialPIM Pro v11.0 便携修改版:全面个人信息管理与同步
- C#源代码的恶作剧外表答题器程序教程
- Weblogic集群配置与优化及常见问题解决方案
- Harvard Dataverse数据的Python Flask API教程
- DNS域名批量解析工具v1.31:功能提升与日志更新
- JavaScript前台表单验证技巧与实例解析
- FLAC二次开发实用论文资料汇总
- JavaScript项目开发实践:Front-Projeto-Final-PS-2019.2解析
- 76云保姆:迅雷云点播免费自动升级体验
- Android SQLite数据库增删改查操作详解
- HTML/CSS/JS基础模板:经典篮球学习项目
- 粒子群算法优化GARVER-6直流配网规划
- Windows版jemalloc内存分配器发布
- 实用强大QQ机器人,你值得拥有
