伺服控制:电子齿轮比计算与应用解析
需积分: 43 130 浏览量
更新于2024-09-09
收藏 218KB PDF 举报
本文详细介绍了伺服控制系统中电子齿轮比的计算方法,通过两个具体的例子帮助理解这一概念。电子齿轮比在伺服系统中起着至关重要的作用,它能够调整伺服电机接收的脉冲频率,从而实现对运动速度和位置的精确控制。
在例子1中,我们考虑了伺服电机的编码器分辨率为131072P/R,额定转速为3000r/min,以及上位机的最大脉冲发送能力为200Kpulse/s。为了达到电机的额定转速,我们需要计算电子齿轮比CMX/CDV。通过一定的算法,我们可以确定合适的电子齿轮比,使得电机能够在接收到的脉冲频率下达到3000r/min。
例子2则涉及到了滚珠丝杠的应用。已知伺服电机的分辨率同样为131072P/R,滚珠丝杠的进给量为8mm,我们需要计算反馈脉冲的当量、指令脉冲当量对应的电子齿轮比,以及电机在额定速度下的脉冲频率。通过简单的数学运算,可以得出:
1. 反馈脉冲的当量:△Lo=8mm/131072
2. 电子齿轮比:△Lo×电子齿轮比×1000=0.1um/p
3. 脉冲频率:Fc×电子齿轮比=3000/60×131072
电子齿轮比的计算涉及到编码器分辨率、丝杠进给量、脉冲当量以及电机速度等多个因素,它的设置直接影响伺服系统的定位精度和速度响应。
此外,文章还解释了机械减速比和电子齿轮比的概念。机械减速比是减速器输入和输出转速的比例,而电子齿轮比则是通过调整伺服驱动器接收的脉冲频率来实现速度的放大或缩小。电子齿轮比的计算公式为B/A,其中B为分子,A为分母,分子大于分母意味着放大,反之则为缩小。
编码器分辨率F是伺服电机每转的脉冲数,而每转脉冲数f是丝杠旋转一圈所需的脉冲数。脉冲当量p是指系统对每个脉冲的响应距离,是影响加工精度和进给速度的关键参数。
总结来说,电子齿轮比是伺服控制系统中不可或缺的一部分,它允许我们根据具体应用需求灵活地调整伺服电机的运动特性,确保系统能够精确地执行各种复杂的运动任务。理解并正确计算电子齿轮比是实现高效、高精度伺服控制的基础。
电子齿轮比计算样例
电子齿轮比是伺服中经常要用到的,初学者对这个参数的设置有时会不解,先介绍两个伺服电子
齿轮设置方面的 2 个小例子,供大家参考下。
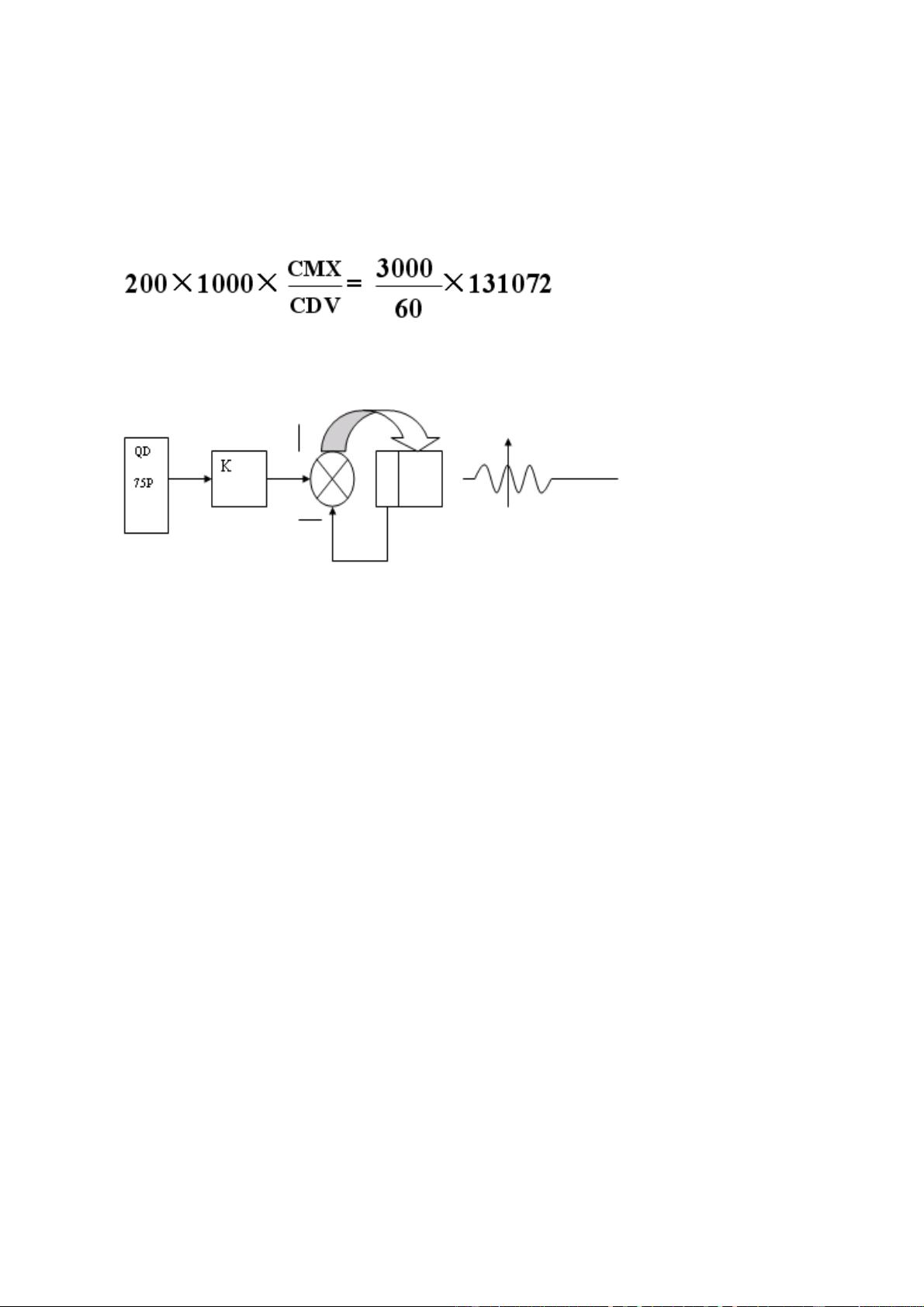
例子 1:已知伺服马达的编码器的分辨率是 131072 P/R,额定转速为 3000r/min,上位机发送脉冲
的能力为 200Kpulse/s,要想达到额定转速,那么电子齿轮比至少应该设为多少?
计算如下图所示
根据上图中的算法,可以算出电子齿轮比 CMX/CDV 的值
例子 2:已知伺服马达的分辨率是 131072 P/R,滚珠丝杠的进给量为 Pb =8mm。
(1) 计算反馈脉冲的当量(一个脉冲走多少)?
△Lo=
(2) 要求指令脉冲当量为 0.1um/p ,电子齿轮比应为多少?
电子齿轮比=
(3) 电机的额定速度为 3000rpm,脉冲频率应为多少?
Fc=
解答:
(1) 计算反馈脉冲的当量(一个脉冲走多少)?
△Lo= 8mm/131072
(2) 要求指令脉冲当量为 0.1um/p ,电子齿轮比应为多少?
△Lo×电子齿轮比×1000=0.1
(3) 电机的额定速度为 3000rpm,脉冲频率应为多少?
Fc×电子齿轮比=3000/60×131072
电子齿轮比与脉冲当量相关计算
1、 什么是机械减速比(m/n)
答:机械减速比的定义是减速器输入转速与输出转速的比值,也等于从动轮齿数与主动轮齿数的
比值。在数控机床上为电机轴转速与丝杠转速之比。
2、什么是电子齿轮比
答:电子齿轮比就是对伺服接受到上位机的脉冲频率进行放大或者缩小,其中一个参数为分子,
一个为分母。如分子大于分母就是放大,如分子小于分母就是缩小。例如:上位机输入频率 100HZ,
电子齿轮比分子设为 1,分母设为 2,那么伺服实际运行速度按照 50HZ 的脉冲来进行。上位机输入
频率 100HZ,电子齿轮比分子设为 2,分母设为 1,那么伺服实际运行速度按照 200HZ 的脉冲来进行
3、 怎样计算电子齿轮比(B/A)
明白几个概念:
编码器分辨率(F):伺服电机轴旋转一圈所需脉冲数。看伺服电机的铭牌,在对驱动器说明书既可确
定编码器的分辨率。
每转脉冲数(f):丝杠转动一圈所需脉冲数。
下载后可阅读完整内容,剩余3页未读,立即下载
点击了解资源详情
点击了解资源详情
2021-09-29 上传
2018-09-03 上传
2021-05-13 上传

plumtree1023
- 粉丝: 0
- 资源: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- Python中快速友好的MessagePack序列化库msgspec
- 大学生社团管理系统设计与实现
- 基于Netbeans和JavaFX的宿舍管理系统开发与实践
- NodeJS打造Discord机器人:kazzcord功能全解析
- 小学教学与管理一体化:校务管理系统v***
- AppDeploy neXtGen:无需代理的Windows AD集成软件自动分发
- 基于SSM和JSP技术的网上商城系统开发
- 探索ANOIRA16的GitHub托管测试网站之路
- 语音性别识别:机器学习模型的精确度提升策略
- 利用MATLAB代码让古董486电脑焕发新生
- Erlang VM上的分布式生命游戏实现与Elixir设计
- 一键下载管理 - Go to Downloads-crx插件
- Java SSM框架开发的客户关系管理系统
- 使用SQL数据库和Django开发应用程序指南
- Spring Security实战指南:详细示例与应用
- Quarkus项目测试展示柜:Cucumber与FitNesse实践
