库卡机器人坐标系详解与测量方法
需积分: 2 53 浏览量
更新于2024-06-26
收藏 2.58MB PPTX 举报
库卡机器人坐标系设置是一项关键的编程任务,用于确保机器人的精确运动和操作。库卡机器人提供了多种坐标系以适应不同的工作场景和任务需求。以下是一些主要的坐标系及其功能:
1. **WORLD世界坐标系**:这是绝对坐标系,也是默认的参考坐标,设备在出厂时,WORLD坐标系的原点固定在底座上,不随机器人动作而改变。它主要用于描述机器人的全局位置。
2. **ROBROOT机器人足部坐标系**:这个坐标系通常与机器人的基础结构关联,但具体定义可能因型号不同而异,一般用于描述机器人相对于地面或基座的位置。
3. **BASE基坐标系**:这是一个笛卡尔坐标系,原点位于外部工具或机器人底座,便于执行基于直角空间的定位和运动控制。它适用于基础操作和工具的安装定位。
4. **FLANGE法兰坐标系**:这个坐标系是连接工具末端执行器(例如手臂法兰)的参考框架,随着工具的旋转和伸缩而变化,是工具定位的重要参考。
5. **TOOL工具坐标系**:基于法兰坐标系,工具坐标系的原点位于工具中心点(TCP),即工具与机器人连接处。X轴通常与工具的工作方向对齐,随工具运动而动态更新,方便精确操作。
6. **JOINT关节坐标系**:在关节坐标中,每个机械轴线独立移动,允许单轴调整,常用于微调和示教操作,可通过微动键(Jogkeys)或SpaceMouse手轮进行控制。
7. **测量方法**:库卡机器人提供了XYZ4点法和ABC2点法来测量TCP(工具中心点)。XYZ4点法要求机器人在四个不同方向移动TCP,记录数据后计算出精确坐标;ABC2点法则简化了过程,仅需在两个点上校准。
在实际应用中,理解并正确设置这些坐标系对于编程、路径规划和调试机器人至关重要,能提高生产效率并确保操作的安全性。熟练掌握这些概念有助于工程师们编写精确的机器人程序,实现高效的自动化生产线。
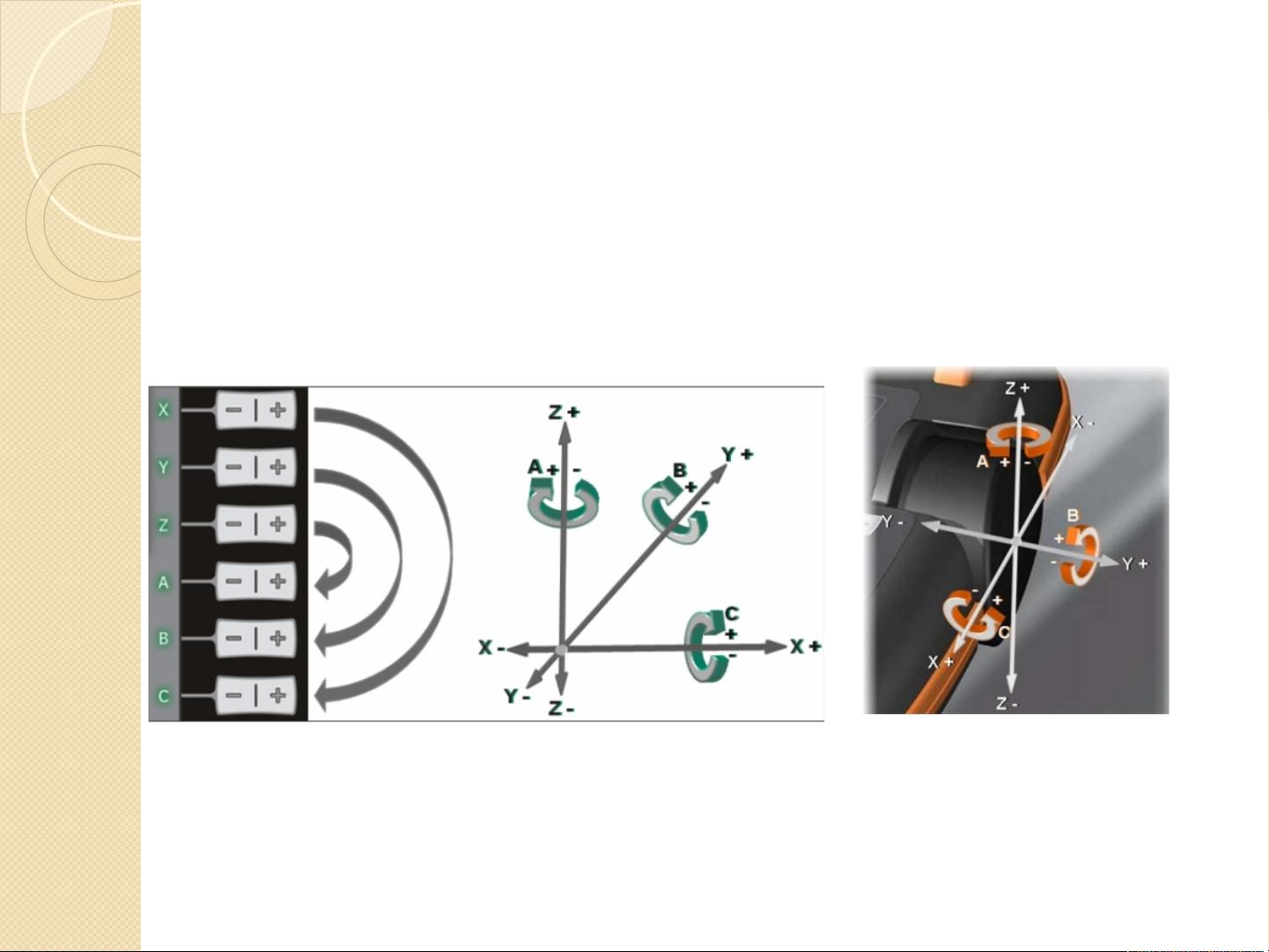
Space Mouse手轮
BASE坐标系
BASE 坐标系是直角坐标,笛卡儿坐标系,其原点位于外部工具。交货时,
BASE坐标系原点位于设备的底座上。
Jog Keys微动键
剩余15页未读,继续阅读
2849 浏览量
962 浏览量
466 浏览量
112 浏览量
2024-11-07 上传
103 浏览量
115 浏览量
1241 浏览量
153 浏览量

博学纪年
- 粉丝: 0
- 资源: 39
 我的内容管理
展开
我的内容管理
展开







最新资源
- Pusher_Backend
- Mini-proyectos:资料库3
- 基于po模式编写的自动化测试(pytest)
- (15.2.2)--网络爬虫进阶项目实战.zip
- 行业文档-设计装置-顶升移动工作平台.zip
- 正交报告
- books_list:书单作业
- 鱼跃CMS-轻量开源企业CMS v1.0.4
- WINDOWS11强制停止WindowsUpdate服务
- matlab2017b的gui转exe.zip
- 回形针-用于类型安全的编译时检查HTTP API的OpenAPI工具库-Rust开发
- nSchedule:学习TBSchedule
- dfti2
- 千博HTML5自适应企业网站系统 v2019 Build0424
- 行业文档-设计装置-一种平台式网版印刷机的自动出料装置.zip
- jdk1.8 下载。 hotspot (包含源码)
