Optix:NVIDIA的高性能光线追踪引擎
需积分: 24 2 浏览量
更新于2024-09-10
收藏 9.76MB PDF 举报
"Optix 光线追踪引擎是一款由NVIDIA开发的通用目的光线追踪引擎,适用于GPU和其他高度并行的架构。它基于一个核心观察:大多数光线追踪算法可以通过一组可编程操作实现。Optix引擎包含一个领域特定的即时编译器,能够结合用户提供的程序来生成定制的光线追踪内核,用于光线生成、材质着色、物体交差点计算以及场景遍历,从而实现高效互动的光线追踪应用。"
光线追踪是一种先进的计算机图形学技术,用于模拟光在现实世界中的传播路径,从而产生逼真的图像。Optix引擎是这个领域的杰出代表,它提供了对硬件加速的充分利用,尤其是在NVIDIA的GPU上,显著提高了渲染速度。
Optix引擎的关键特性包括:
1. **可编程性**:Optix允许开发者编写自定义的光线生成、材质处理、交点检测和场景遍历的着色器,这些着色器可以组合成高效的光线追踪内核。这种灵活性使得Optix能够适应各种复杂的光线追踪算法,如物理基础光照(Physical-Based Lighting)、路径追踪、光子映射等。
2. **即时编译器**:Optix的即时编译器(JIT)能够根据应用需求动态生成优化的CUDA代码,确保了最佳性能。这减少了开发者为不同硬件平台优化代码的工作量。
3. **并行处理**:Optix充分利用GPU的并行处理能力,处理大量并发的光线与场景交互,大大提升了渲染效率。对于大规模的光线追踪任务,如大型场景的可见性检测、碰撞检测或复杂的几何体动态更新,这种并行处理尤为关键。
4. **交互式渲染**:由于其高效性能,Optix支持实时或近实时的渲染,这对于交互式应用程序,如设计工具、游戏和虚拟现实环境至关重要。
5. **高级功能**:Optix还提供了诸如全局光照、环境遮蔽、次表面散射等高级光照效果。例如,路径追踪能够模拟真实世界的光照传输,而光子映射则能处理间接照明和全局光照,使图像更加真实。
6. **库和API**:Optix提供了一个丰富的库和易于使用的API,方便开发者集成到他们的应用程序中,简化了光线追踪的实现过程。
7. **优化和兼容性**:Optix不断进行更新和优化,以适应新的GPU架构和提高与各种软件框架的兼容性,如OpenGL和DirectX。
Optix光线追踪引擎为开发者提供了一个强大且灵活的工具,不仅能够实现高质量的视觉效果,还能实现高性能和互动性,广泛应用于电影特效、游戏开发、建筑设计和科研等领域。通过深入理解和应用Optix,开发者可以构建出更为真实和生动的三维世界。
Launch
Traverse Shade
Ray Generation
Program
Miss
Program
Closest Hit
Program
Selector Visit
Program
Intersection
Program
Any Hit
Program
Acceleration
Traversal
Node Graph
Traversal
rtContextLaunch
rtTrace
Exception
Program
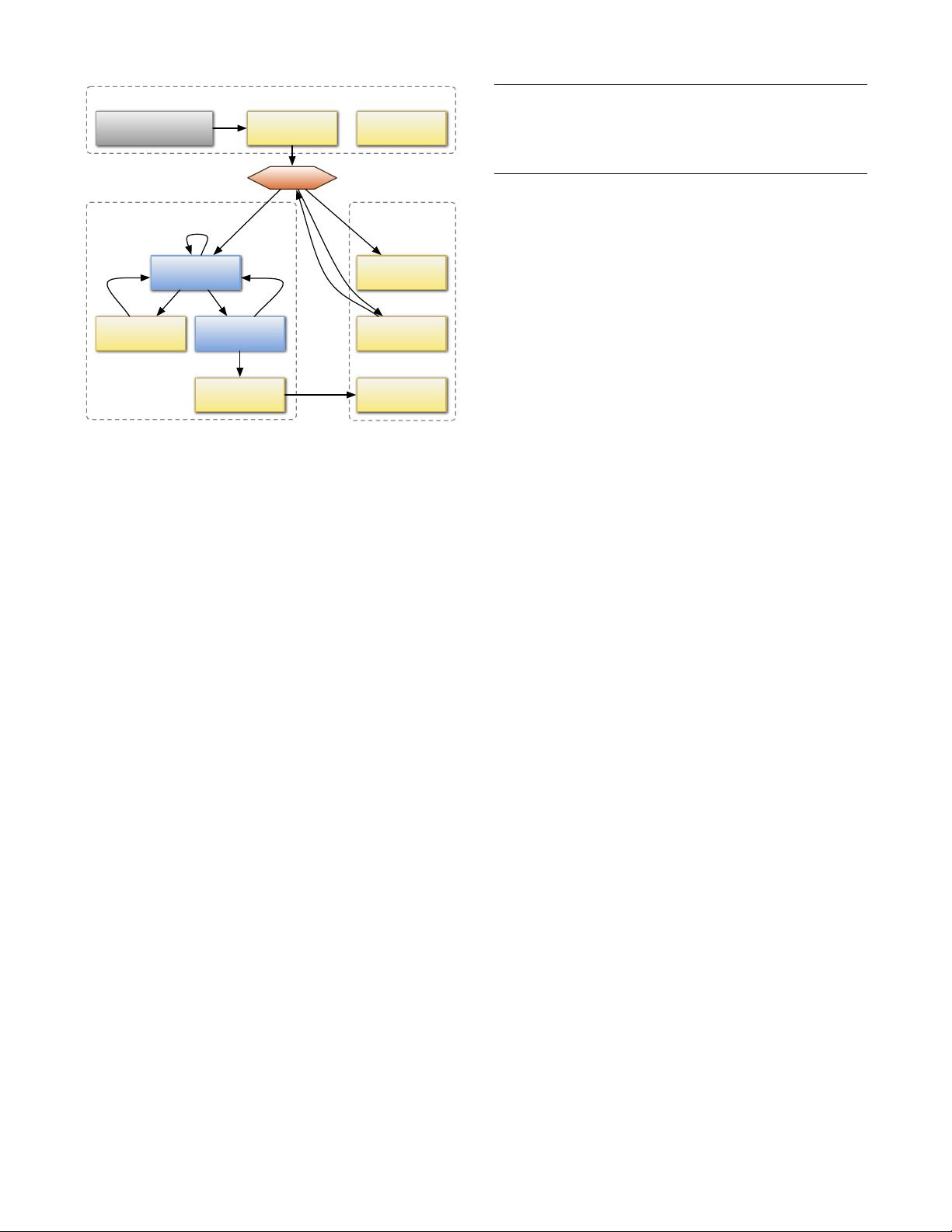
Figure 2: A call graph showing the control flow through the ray
tracing pipeline. The yellow boxes represent user-specified pro-
grams and the blue boxes are algorithms internal to OptiX. Execu-
tion is initiated by the API call rtContextLaunch. A built-in func-
tion, rtTrace, can be employed by the ray generation program to
cast rays into the scene. This function may also be called recur-
sively by the closest hit program for shadow and secondary rays.
The exception program is executed when the execution of a partic-
ular ray is terminated by an error such as excessive memory con-
sumption.
variety of mesh representations. A programmable intersection op-
eration facilitates direct access to the native format, which can help
avoid copies when interoperating with rasterization-based systems.
Bounding box programs compute the bounds associated with each
primitive to enable acceleration structures over arbitrary geometry.
Given a primitive index, a simple program of this type may, for
example, read vertex data from a buffer and compute a triangle’s
bounding box. Procedural geometry can sometimes only estimate
the bounds of a primitive. Such estimates are allowed as long as
they are conservative, but loose bounds may degrade performance.
Closest hit programs are invoked once traversal has found the clos-
est intersection of a ray with the scene geometry. This program
type closely resembles surface shaders in classical rendering sys-
tems. Typically, a closest hit program will perform computations
like shading, potentially casting new rays in the process, and store
result data in the ray payload.
Any hit programs are called during traversal for every ray-object
intersection that is found. The any hit program allows the ma-
terial to participate in object intersection decisions while keep-
ing the shading operations separate from the geometry opera-
tions. It may optionally terminate the ray using the built-in func-
tion rtTerminateRay, which will stop all traversal and unwind the
call stack to the most recent invocation of rtTrace. This is a
lightweight exception mechanism that can be used to implement
early ray termination for shadow rays and ambient occlusion. Al-
ternatively, the any hit program may ignore the intersection us-
ing rtIgnoreIntersection, allowing traversal to continue looking for
other geometric objects. An intersection may be ignored, for in-
stance, based on a texture channel lookup, thus implementing effi-
cient alpha-mapped transparency without restarting traversal. An-
RT_PROGRAM void pinhole_camera() {
Ray ray = PinholeCamera::makeRay( launchIndex );
UserPayload payload;
rtTrace( topObject, ray, payload );
outputBuffer[launchIndex] = payload.result;
}
Figure 3: Example ray generation program (in CUDA C) for a
single sample per pixel. The 2-dimensional grid location of the
program invocation is given by the semantic variable launchIn-
dex, which is used to create a primary ray using a pinhole camera
model. Upon tracing a ray, the invoked material hit programs fill
the result field of the user-defined payload structure. The variable
topObject refers to the location in the scene hierarchy where ray
traversal should start, typically the root of the node graph. At the
location specified by launchIndex, the result is written to the output
buffer to be displayed by the application.
other use case for the any hit program can be found in Section 8.1,
where the application performs visibility attenuation for partial
shadows cast by glass objects. Note that intersections may be pre-
sented out of order. The default any hit program is a no-op, which
is often the desired operation.
Miss programs are executed when the ray does not intersect any
geometry in the interval provided. They can be used to implement
a background color or environment map lookup.
Exception programs are executed when the system encounters an
exceptional condition, e.g., when the recursion stack exceeds the
amount of memory available for each thread, or when a buffer ac-
cess index is out of range. OptiX also supports user-defined excep-
tions that can be thrown from any program. The exception program
can react, for example, by printing diagnostic messages or visualiz-
ing the condition by writing special color values to an output pixel
buffer.
Selector visit programs expose programmability for coarse-level
node graph traversal. For example, an application may choose to
vary the level of geometric detail for parts of the scene on a per-
ray basis. In this case, the visit program would examine the ray
distance or a ray differential stored with the payload and make a
traversal decision based on that data.
3.2 Scene representation
The OptiX engine employs a flexible structure for representing
scene information and associated programmable operations, col-
lected in a container object called the context. This representa-
tion is also the mechanism for binding programmable shaders to
the object-specific data that they require. In conjunction with a
special-purpose object model described in Section 3.3, a compact
representation of scene data is achieved.
3.2.1 Hierarchy nodes
A scene is represented as a graph. This representation is very
lightweight and controls the traversal of rays through the scene. It
can also be used to implement instancing two-level hierarchies for
animations of rigid objects, or other common scene structures. To
support instancing and sharing of common data, the nodes can have
multiple parents.
Four main node types can be used to provide the scene representa-
tion using a directed graph. Any node can be used as the root of
scene traversal. This allows, for example, different representations
to be used for different ray types.
剩余12页未读,继续阅读
2021-06-11 上传
2021-07-06 上传
2023-05-27 上传
2023-11-03 上传
2023-06-06 上传
2023-03-29 上传
2023-12-23 上传
2023-12-29 上传

xu6777030
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- MATLAB新功能:Multi-frame ViewRGB制作彩色图阴影
- XKCD Substitutions 3-crx插件:创新的网页文字替换工具
- Python实现8位等离子效果开源项目plasma.py解读
- 维护商店移动应用:基于PhoneGap的移动API应用
- Laravel-Admin的Redis Manager扩展使用教程
- Jekyll代理主题使用指南及文件结构解析
- cPanel中PHP多版本插件的安装与配置指南
- 深入探讨React和Typescript在Alias kopio游戏中的应用
- node.js OSC服务器实现:Gibber消息转换技术解析
- 体验最新升级版的mdbootstrap pro 6.1.0组件库
- 超市盘点过机系统实现与delphi应用
- Boogle: 探索 Python 编程的 Boggle 仿制品
- C++实现的Physics2D简易2D物理模拟
- 傅里叶级数在分数阶微分积分计算中的应用与实现
- Windows Phone与PhoneGap应用隔离存储文件访问方法
- iso8601-interval-recurrence:掌握ISO8601日期范围与重复间隔检查
