机器人运动学基础:从齐次坐标到运动分析
版权申诉
170 浏览量
更新于2024-07-01
收藏 11.14MB PDF 举报
"机器人技术基础:运动学.pdf"
在机器人技术中,运动学是研究机器人机械结构运动特性的学科。它关注的是如何通过控制各个关节的运动来实现机器人手部在空间中的定位和定向,以及各个杆件之间的相对运动。本资料主要涵盖了机器人运动学的基础概念,包括位姿描述、齐次坐标和变换、以及串联机器人坐标系和运动学分析。
首先,机器人位姿是描述机器人手部在空间中位置和姿态的关键参数。它基于一个特定的机器人坐标系,通常由一个3×1的位置矩阵表示位置,一个3×3的姿态矩阵表示方向。位姿的理解和描述是进行机器人运动控制的前提。
齐次坐标是一种扩展的坐标表示方式,用于更方便地描述空间中的点和向量。在齐次坐标中,一个n维空间的点被表示为n+1维的坐标,额外的一维称为比例因子。当比例因子为1时,这就是齐次坐标的规范化形式。例如,在三维空间中,一个点P的位置可以用[ PX, PY, PZ, 1 ]T来表示。齐次坐标在进行坐标变换时特别有用,因为它们允许直线和旋转的组合转换被表示为简单的矩阵乘法。
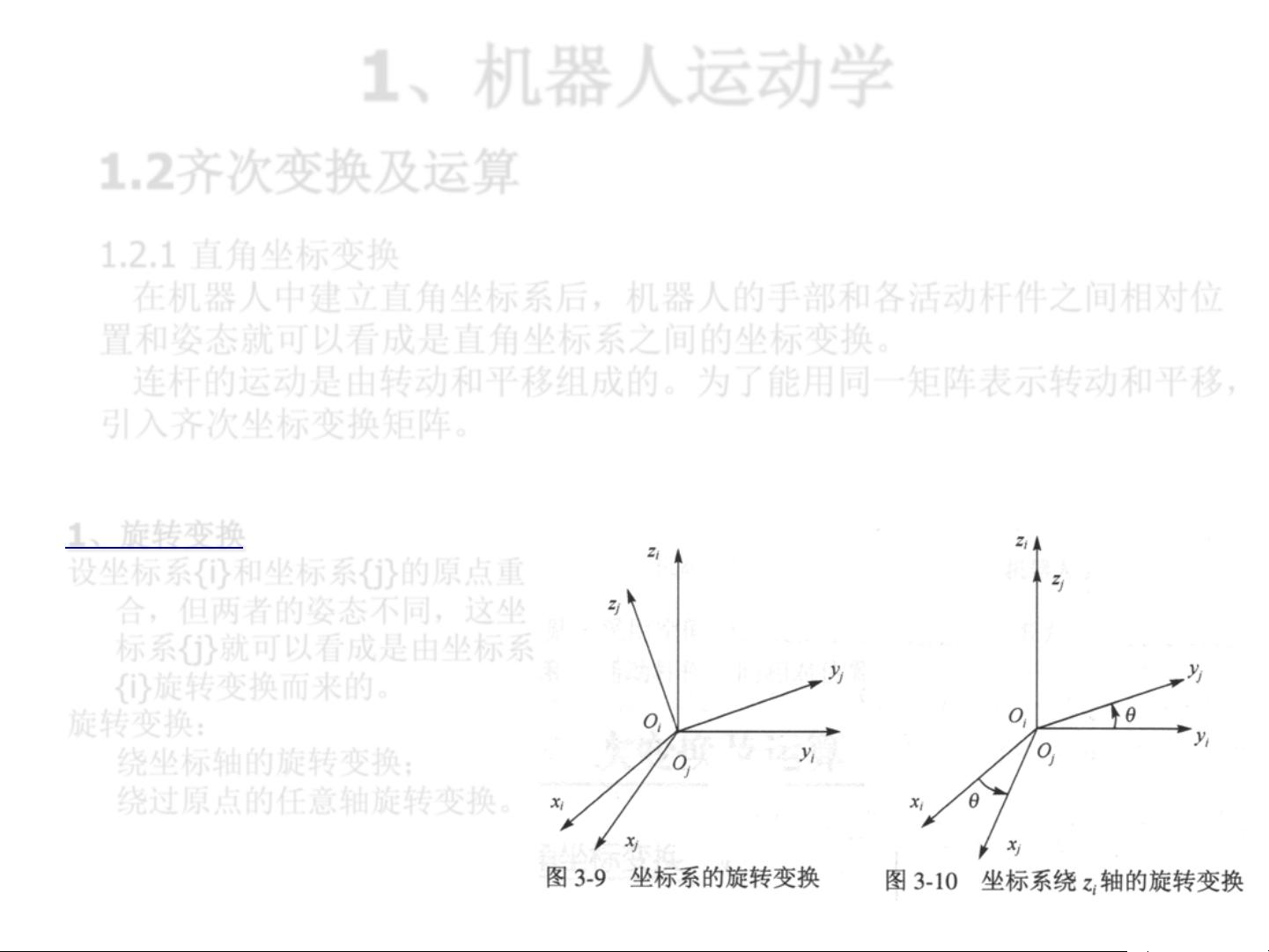
齐次变换是通过4×4的变换矩阵来完成的,它可以同时处理平移和旋转。这种变换在机器人学中至关重要,因为它允许对机器人各个关节的运动进行合成,从而得到整个机器人臂在空间中的运动轨迹。坐标轴的方向可以使用齐次坐标来表示,例如,X、Y、Z轴的单位向量分别对应于[1, 0, 0, 0]T、[0, 1, 0, 0]T和[0, 0, 1, 0]T。
对于串联机器人,其结构由一系列关节和杆件组成,形成一个开链结构,一端固定,另一端是执行任务的手部。每个关节的运动会影响到下一个杆件的位置和方向,从而影响到手部的最终位姿。机器人运动学的任务就是建立这些关节运动与手部空间位姿之间的数学关系,这被称为正向运动学。反之,如果已知手部的位姿,反求各个关节的角度,这个过程称为逆向运动学。
串联机器人坐标系是理解机器人运动的关键。通常,每个关节都有自己的局部坐标系,而整个机器人有一个全局坐标系。通过一系列的齐次变换,可以从一个坐标系转换到另一个,最终计算出手部在全局坐标系中的位姿。
这份资料深入浅出地介绍了机器人运动学的基本原理,包括位姿描述、齐次坐标和变换,以及串联机器人的运动学分析。这些知识对于设计、控制和编程机器人系统是必不可少的。通过学习这部分内容,读者能够理解和应用这些理论,以实现对机器人精确的运动控制。

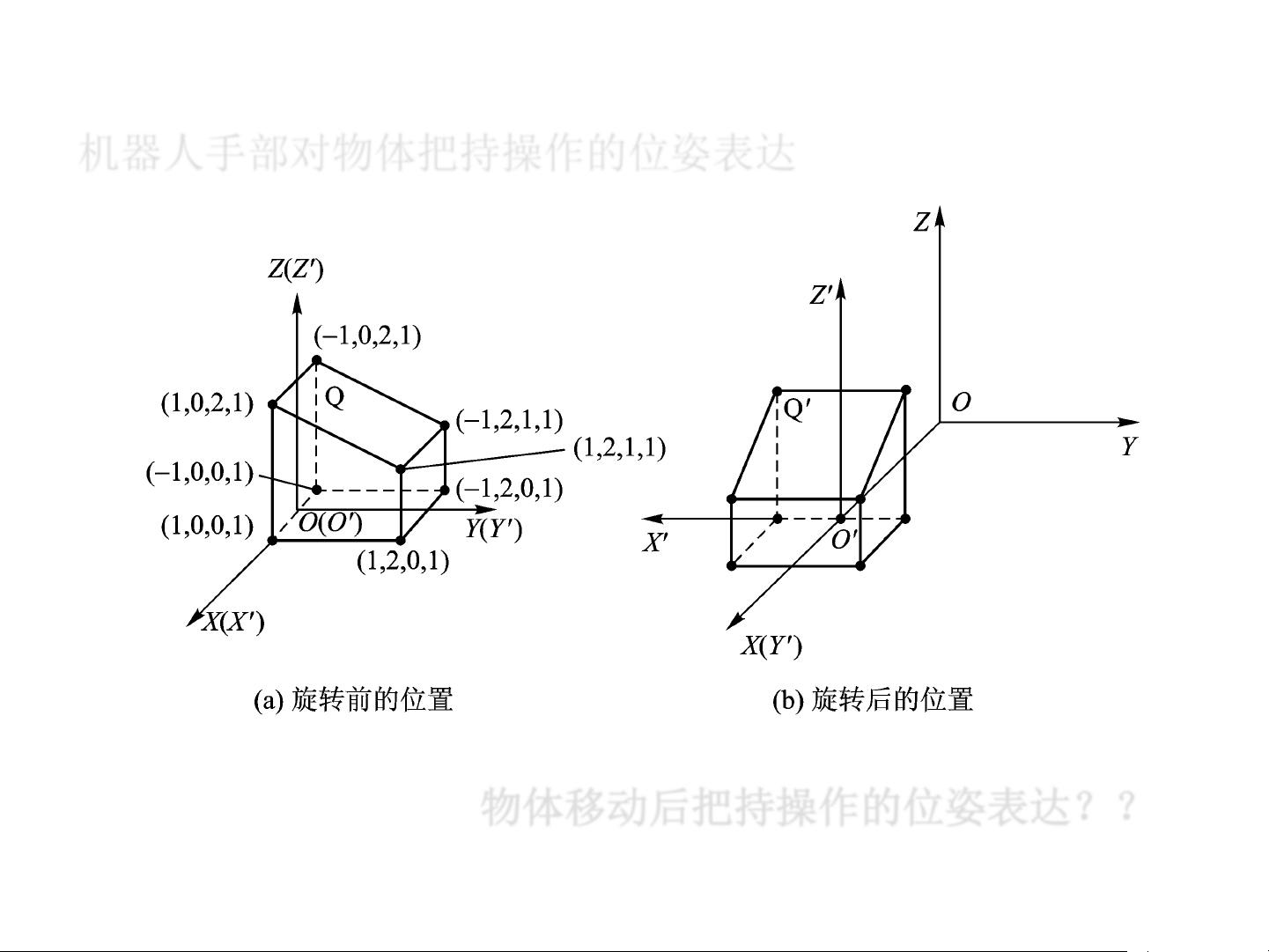
例:如图表示手部抓握物体Q,物体是边长为2个单位的正立方体,写出表达该
手部位姿的矩阵表达式
机器人手部把持操作的位姿表达
因为物体Q的形心与手部坐标系O"X"Y"Z"的坐标原点O"相重合,则手部位置的4×1列阵
为
手部坐标系X"轴的方向可用单位矢量n来表示,手部坐标系Y"轴与Z"轴的方向可分别
用单位矢量o和a来表示
机器人手部把持操作的位姿表达:
剩余59页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2022-07-08 上传
2021-09-17 上传
2021-09-17 上传
2021-09-17 上传
2022-11-04 上传
2021-09-17 上传

wxg520cxl
- 粉丝: 25
- 资源: 3万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- oracle常用查询代码下载
- Java Portlet 规范-JSR168(英文版)
- 应用程序开发—MVC with Webwork2
- Enterprise-Ajax-Security-with-ICEfaces.pdf
- jsp分页(粘贴就可用)
- sht11源码(基于51单片机的)
- ADO.NET高級編程
- 基于单片机控制的变频调速系统
- playfair.doc
- photoshop cs2 cs3快捷键大全
- Matlab图形图像处理函数
- 综合布线概念详释word
- webservice & uddi 介绍
- asp.net使用技巧大全
- 软件开发者面试百问 不要错过
- CISCO 2500、1600系列路由器使用手册
