KUKA SeamTech Finding 2.1:中文视觉寻址指南
需积分: 10 197 浏览量
更新于2024-07-15
1
收藏 3.41MB PDF 举报
"kuka_SeamTech_Finding中文说明书--视觉探寻.pdf"
KUKA.SeamTechFinding2.1是一款专为库卡(KUKA)机器人系统设计的视觉定位软件,适用于KUKA System Technology 8.3版本。该文档详细介绍了如何使用这款软件进行精确的焊缝寻找和定位,主要针对工业自动化中的焊接应用。发布日期为29.01.2015,版本号为KSTSeamTechFinding2.1V1。
文档的目标群体主要是那些需要使用KUKA机器人进行焊接作业的工程师和技术人员。它不仅提供了关于KUKA机器人系统的基础知识,还包含了一套完整的图示和术语解释,帮助用户理解和操作SeamTechFinding软件。
SeamTechFinding的核心功能是通过视觉传感器测量焊缝的位置和特征,确保机器人能够准确地找到焊缝并执行焊接任务。软件基于两种基本的焊缝测量原理:一是位置测量,用于确定焊缝的精确位置;二是特征测定,通过分析焊缝的形状和特征来优化焊接路径。文档中通过具体的例子,如重叠焊缝和半V形焊缝,展示了这些原理的实际应用。
在通讯方面,SeamTechFinding可以与多种传感器集成,包括SERVO-ROBOT的DIGI-I型和PowerCam,以及SF/D型传感器。此外,还支持META的SLS型传感器,这些传感器与软件的配合能够实现高效的焊缝识别和跟踪。
在安全部分,文档强调了在安装和使用过程中的安全规范,确保操作人员和设备的安全。安装章节则指导用户如何满足系统前提条件,并详细介绍了安装或更新SeamTechFinding软件的步骤。
KUKA.SeamTechFinding2.1是KUKA机器人系统中一个关键的视觉导向模块,它利用先进的视觉技术,提高了自动化焊接过程的精度和效率。用户手册提供了详尽的操作指南和技术细节,有助于用户充分利用这一工具,提升生产质量。
14 / 85 发布日期 :29.01.2015 版本 :KST SeamTech Finding 2.1 V1
KUKA.SeamTech Finding 2.1
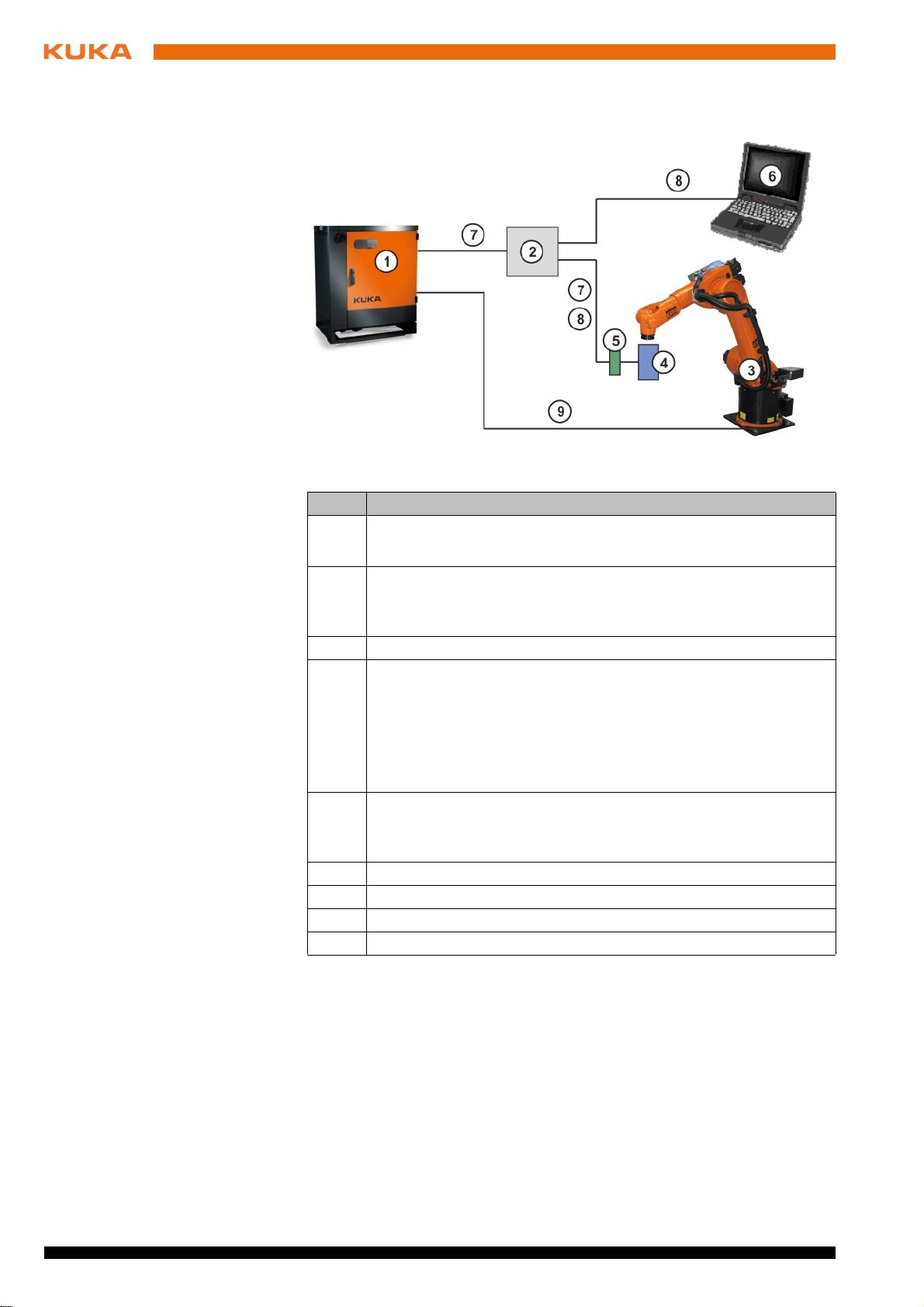
2.5.3 META 传感器 (SLS 型)
图 2-8: 示意图
序号 说明
1 机器人控制系统; IP 地址: 192.168.11.x
必须将 IP 地址输入窗口 网络配置。
2 转换器 (Switch)
用转换器可从各不同的设备 (机器人控制系统、外部 PC)访问传
感器的端口。
3 机器人,
4 传感器;默认 IP 地址: 192.168.11.156
若希望得到另一个 IP 地址,则必须将其输入以下地方:
WorkVisual 的 SeamTechFinding 编辑器中
传感器上。 相关信息请参看传感器制造商的资料。
传感器上有 1 个用于连接机器人控制系统或外部 PC 的端口。
5 SLS Break out Board
传感器与机器人控制系统之间的连接通过 Break out Board 建立。
该接线在传感器制造商的资料中进行了说明。
6 带 Smart Laser Tools 软件的外部 PC ; IP 地址: 192.168.11.xx
7 机器人控制系统与传感器之间的 TCP/IP 连接
8 传感器与外部 PC 之间的 TCP/IP 连接
9 机器人控制系统与机器人之间的连接

剩余84页未读,继续阅读
2019-07-17 上传
2023-07-29 上传
2023-05-11 上传
2023-08-14 上传
2023-08-13 上传
2023-08-12 上传
2023-02-23 上传









