KUKA KR C4机器人与S7-1200PLC PROFINET通信配置指南
版权申诉
"本文档详细介绍了KUKA KR C4机器人与S7-1200 PLC通过PROFINET通信的配置步骤,包括KUKA机器人的配置、S7-1200 PLC的配置以及GSD文件的安装。"
在工业自动化领域,KUKA KR C4机器人与Siemens S7-1200 PLC的通信通常采用PROFINET协议,这是一种基于以太网的工业通信标准,能够实现高效、实时的数据交换。以下为具体配置步骤:
1. **KUKA机器人配置**:
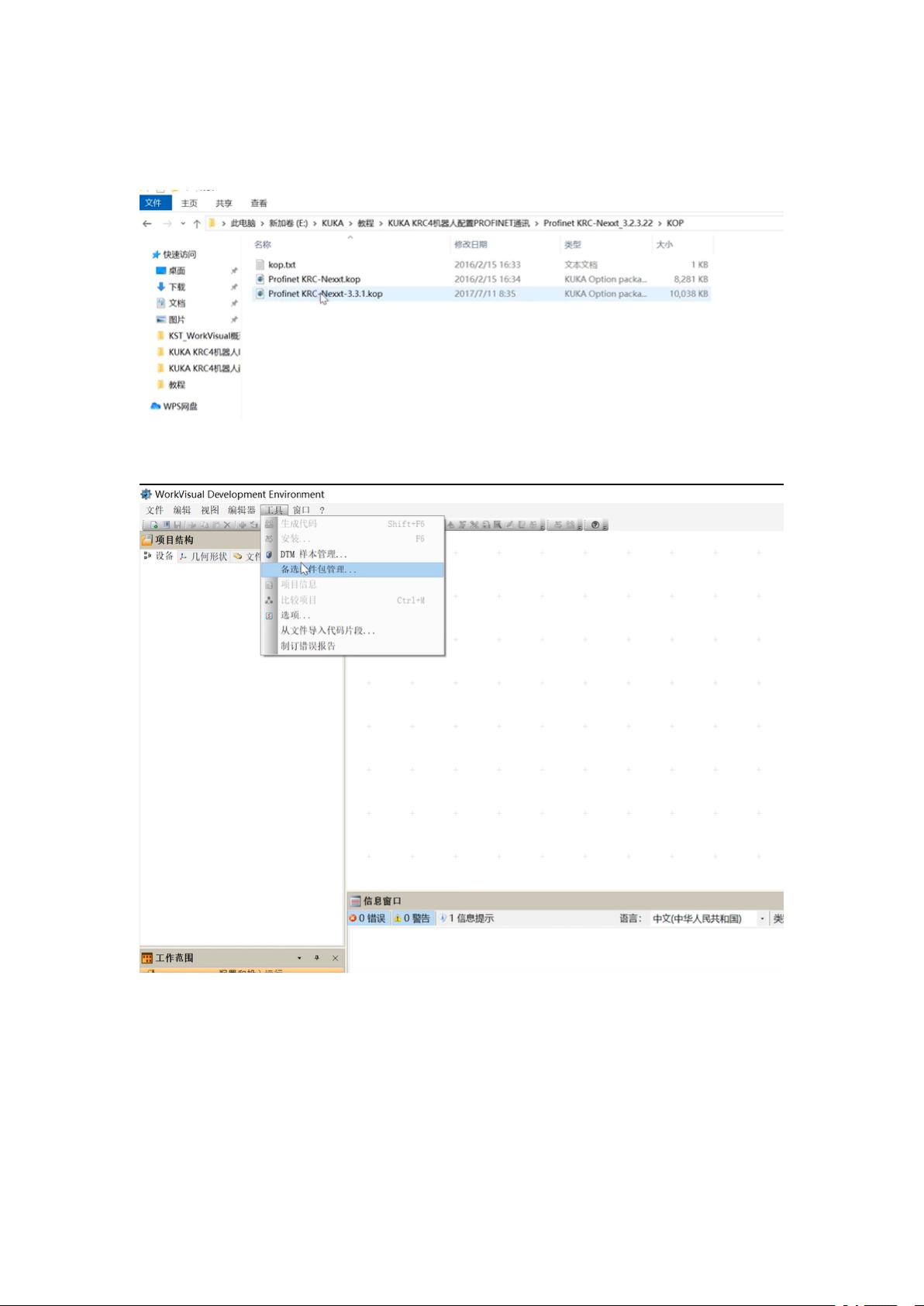
- 首先,从KUKA机器人控制柜拷贝KOP软件包,并在WorkVisual Development Environment中安装。
- 打开项目,选中KRC4机器人,右键激活并添加已安装的选件包。
- 在总线结构中,右键添加PROFINET接口,设置设备名称和IO点数(例如,256个Bool位)。
- 在接口配置界面中,配置接口参数,并在输入输出接线中设定数字输入和输出端的起始地址。
2. **S7-1200 PLC配置**:
- 关键步骤之一是获取KUKA机器人的GSD(Generic Station Description)文件,这包含了机器人通信所需的信息。
- 将GSD文件导入TIA Portal(Siemens的编程软件),确保文件版本与机器人型号匹配。
- 在TIA Portal中,通过管理通用站描述文件GSD,安装GSD文件。
- 更新硬件目录后,在网络视图中添加KUKA机器人模块,分配给PLC1。
- 设置机器人模块的IP地址和PN设备名称,保持与机器人侧一致。
- 在设备概览中,调整模块配置,如需删除默认配置并重新添加IO模块。
3. **数据映射**:
- KUKA的256个点位(Bool位)对应32个字节的输入输出模块。
- IB2-IB33映射为机器人的输出信号,QB2-QB33映射为机器人的输入信号。
完成上述步骤后,KUKA KR C4机器人与S7-1200 PLC之间的PROFINET通信链路就建立起来了,允许两者之间进行数据交换,实现机器人运动控制和状态监控等功能。在实际应用中,务必确保所有配置的正确性,尤其是IP地址、设备名称和GSD文件版本,否则可能引起通信失败。此外,定期检查网络连接和通信状态,以保证系统的稳定运行。
KUKA KR C4 机器人与 S7-1200PLC 进行 PROFINET 通信的具体方法和步骤
首先,从 KUKA 机器人控制柜中将 KOP 备选软件包拷贝出来,然后在“WorkVisual Development
Environment”安装 KUKA 备选软件包(版本非常重要,尽量从控制柜中拷贝)
下载后可阅读完整内容,剩余8页未读,立即下载
点击了解资源详情
点击了解资源详情
点击了解资源详情
2021-11-06 上传
2022-06-15 上传
2022-06-17 上传
2022-06-16 上传

AAA_自动化工程师
- 粉丝: 7111
- 资源: 3469
 我的内容管理
展开
我的内容管理
展开







最新资源
- dotfiles:@nstickney的配置文件
- ReParcel:最小的React-Parcel入门模板,准备与Netlify和Vercel一起发布!
- Lua脚本支持库1.0版(mLua.fne)-易语言
- comp3133-fullstack2:COMP3133全栈2
- noahportfolio.io:Noah的图片组合
- notesncoffees
- HTML5-Face-Detection:使用CCV Javascript库HTML5视频人脸检测
- agencia_de_viajes_app:通过ajecia部署应用程序
- splunk-heroku-app:Splunk 您的 Heroku 应用程序日志
- ordaap-customer-app:酒店客房服务应用程序
- github-slideshow:机器人提供动力的培训资料库
- partymeister-core
- 行业分类-设备装置-一种全自动纸袋成型设备.zip
- 实体店会员管理系统-本地edb版-易语言
- bitacora:公平交易决定权
- DMOJ-解决方案:dmoj.ca问题和竞赛的我的解决方案
