递归模糊神经网络的非线性广义预测控制策略
需积分: 10 73 浏览量
更新于2024-08-12
1
收藏 250KB PDF 举报
本文探讨了一种创新的控制策略,即在2012年提出的"一种递归模糊神经网络的广义预测控制方法"。该研究主要集中在如何利用递归模糊神经网络(RFNN)来增强非线性系统控制的性能。RFNN通过引入向量调节层,显著提升了网络处理输入信息的能力,这层结构允许网络更好地捕捉和处理复杂输入特征,使得网络能够更加精确地模拟和响应非线性系统的动态行为。
核心思想是首先设计了一个基于RFNN的非线性系统的离散数学多步模糊预测模型,这个模型能够对系统的未来输出进行预测。预测控制算法随后被应用于这个模型,以生成适应性的控制策略,旨在减少系统误差并提高控制精度。这种方法的一个关键优势在于其广义预测控制特性,这种特性使得算法具有良好的鲁棒性和抵抗系统滞后的能力,这对于工业过程控制中的实时应用尤其重要。
然而,传统的广义预测控制算法主要针对线性系统,对于非线性系统,尤其是具有强烈非线性特性的复杂工业系统,可能存在局限。作者通过将非线性系统在工作点附近进行局部线性化的方法进行了改进,但这种方法可能无法应对大规模在线计算的需求,而且对于强烈的非线性,控制效果可能会受限。
模糊神经网络的引入为解决这些问题提供了新思路,因为它们具备模糊推理和学习能力,能够有效处理非线性问题。文中构建的T-S递归模糊神经网络通过反馈连接利用先验信息,而向量调节层的添加则使得网络规则更具灵活性,能够更精确地反映输入数据的特征。这种结构的融合使得模糊预测模型更为精确,进而提高了整个控制系统的性能,包括更高的控制精度和一定的抗干扰能力。
文章的研究背景是基于山西省自然科学基金的资助,接收日期为2011年10月9日,显示出研究者对该领域前沿技术的关注和投入。这篇文章提供了一种创新的方法来提升非线性系统控制的效率和稳定性,对于理解和优化现代工业过程控制系统具有重要的理论价值和实践意义。
第
43
卷第
1
期
2012
年
1
月
太原理工大学学报
Vo
l.
43
No.1
Jan.
2012
JOURNAL
OF
TAIYUAN
UNIVERSITY
OF
TECHNOLOGY
文章编号
:1007-9432(2012)01-0011-05
一种递归模糊神经网络的广义预测控制方法
李国勇,刘鹏
(太原理工大学信息工程学院,太原
030024)
摘 要
z
提出了一种递归模糊神经网络
(RFNN)
.通过加入向量调节层,提高了网络对输入信
息的处理能力。基于所设计的递归模糊神经网络,建立非线性系统的离散数学多步模糊预测模型,
根据这一模型对系统的输出进行预测,然后利用预测控制算法得到相应的预测控制规律。仿真结
采表明该方法具有较高的控制精度以及一定的抗干扰能力。
关键词
z
归模糊神经网络;向量调节;广义预测控制
E
非线性
中图分类号
:TP183
文献标识码
:A
广义预测控制算法
(GPC)
具有鲁棒性强,能够
有效克服系统滞后的优越特性,因此在工业过程控
制中取得了不少成功的应用,但是现有的广义预测
控制算法大多是针对线性系统的,而复杂的工业系
统往往包含非线性特性。对于非线性系统,采用较
多的方法是将非线性模型工作点附近进行局部线性
化。此方法主要存在不能很好解决在线计算量大的
问题,且如果系统具有很强非线性则往往不能达到
满意的控制效果。
近些年来,在模糊神经网络方面的研究和进展,
给工业过程控制及建模提供了一条新的途径。模糊
神经网络既可以进行模糊推理又可以像神经网络一
样进行学习,具有非常强的非线性逼近能力,这使模
糊模型可以很好的描述对象的非线性动态特性。本
文构造了一种
T-S
递归模糊神经网络,该递归模糊
神经网络在第二层中加入反馈连接使它能够有效的
利用对象的先验信息,从而对系统的动态特性有更
好的把握,并在规则适应度层和归一运算层之间加
入向量调节层,使各条规则在该层都与一个由权值
向量及偏置量所构成的超平面相对应。根据输入数
据与超平面相对位置关系,对输入数据做进一步处
理,从而能更准确、丰富表达输入数据所包含的信
息,使归一运算层运算结果更精确。在该递归模糊
神经网络
(RFNN)
的基础上提出一种广义预测控制
方案,该方案中
RFNN
被用于对非线性控制对象建
立离散数学多步模糊预测模型,从而得出模糊预测
收稿日期:
2011-10-09
基金项目:山西省自然科学基金资助项目
(2011011011-
1)
控制规律对控制对象进行控制。
1
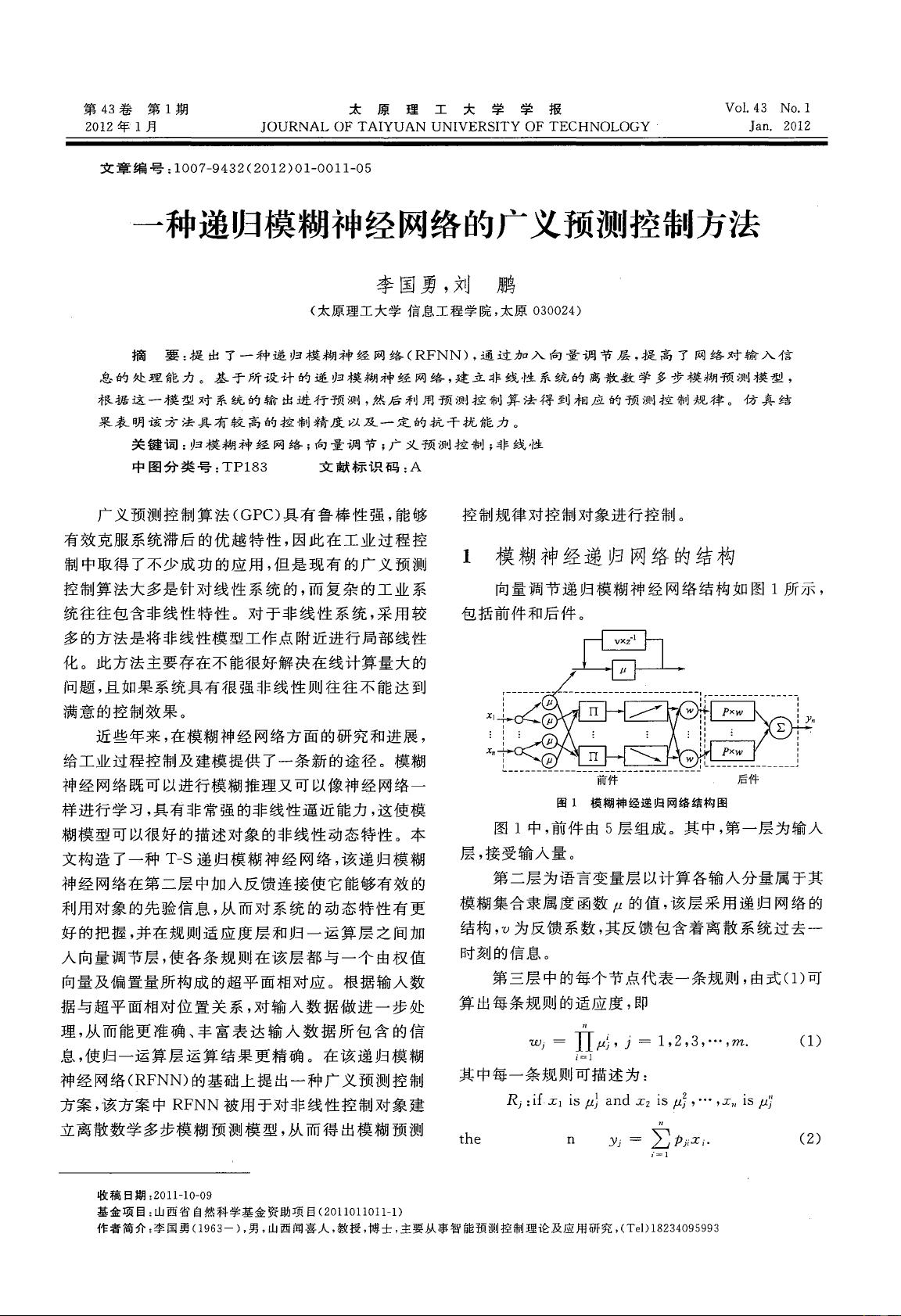
模糊神经递归网络的结构
向量调节递归模糊神经网络结构如图
1
所示,
包括前件和后件。
「→
vxz.
1
←寸
(一「
μ
「一一+
前件
图
l
模糊棉经递归网络结构图
后件
图
l
中,前件由
5
层组成
o
其中,第一层为输入
层,接受输入量。
第二层为语言变量层以计算各输入分量属于其
模糊集合隶属度函数
μ
的值,该层采用递归网络的
结构
,
V
为反馈系数,其反馈包含着离散系统过去一
时刻的信息。
第三层中的每个节点代表一条规则,由式(1)可
算出每条规则的适应度,即
Wj
II
,u~,
j 1 , 2 , 3 , ••• ,
m.
(1)
i=l
其中每一条规则可描述为:
Rj
:i
f.
xj
isμ1
and
Xz
isμj
,…
'X
ll
1Sμ:
the
n
Yj
=
~ρ
jîXj_
(2)
作者简介:李国勇
0963-)
,男,山西闻喜人,教授,博士,主要从事智能预测控制理论及应用研究,(T
e
l)
18234095993
下载后可阅读完整内容,剩余4页未读,立即下载
2021-09-26 上传
点击了解资源详情
2021-09-26 上传
2021-09-26 上传
2021-05-19 上传
2019-07-22 上传
2021-09-25 上传
2021-05-10 上传
点击了解资源详情

weixin_38558660
- 粉丝: 2
- 资源: 937
 我的内容管理
展开
我的内容管理
展开







最新资源
- ES管理利器:ES Head工具详解
- Layui前端UI框架压缩包:轻量级的Web界面构建利器
- WPF 字体布局问题解决方法与应用案例
- 响应式网页布局教程:CSS实现全平台适配
- Windows平台Elasticsearch 8.10.2版发布
- ICEY开源小程序:定时显示极限值提醒
- MATLAB条形图绘制指南:从入门到进阶技巧全解析
- WPF实现任务管理器进程分组逻辑教程解析
- C#编程实现显卡硬件信息的获取方法
- 前端世界核心-HTML+CSS+JS团队服务网页模板开发
- 精选SQL面试题大汇总
- Nacos Server 1.2.1在Linux系统的安装包介绍
- 易语言MySQL支持库3.0#0版全新升级与使用指南
- 快乐足球响应式网页模板:前端开发全技能秘籍
- OpenEuler4.19内核发布:国产操作系统的里程碑
- Boyue Zheng的LeetCode Python解答集
