倒立摆系统建模:RBF-ARX模型的应用与优势
需积分: 50 178 浏览量
更新于2024-08-12
收藏 389KB PDF 举报
"这篇论文是2008年9月发表在《控制工程》杂志第15卷第5期上的,作者是彭辉和廖娟娟,来自中南大学信息、科学与工程学院。文章主要探讨了如何使用RBF-ARX模型来处理直线一级倒立摆控制系统的非线性动态特性建模问题。"
本文的核心知识点:
1. **RBF-ARX模型**:RBF(Radial Basis Function,径向基函数)-ARX(AutoRegressive eXogenous,自回归外生)模型是一种混合模型,结合了RBF网络的非线性表达能力和ARX模型的线性时序建模能力。RBF网络通过一系列基函数来近似非线性关系,而ARX模型则用于描述输入和输出之间的线性因果关系。
2. **倒立摆系统**:倒立摆是一个典型的非线性控制系统,因为它在平衡点附近表现出强烈的非线性动态行为。直线一级倒立摆是指只有一个摆臂的倒立摆,控制目标是保持摆杆垂直,这在机器人学和控制理论中常被用作研究非线性控制策略的平台。
3. **模型结构选择**:在建立RBF-ARX模型时,需要选择合适的模型结构,包括RBF网络的基函数类型、数量以及ARX模型的阶数等,这些参数直接影响模型的复杂度和准确性。
4. **模型参数辨识**:通过数据分析,确定模型的参数,包括RBF网络的中心位置、宽度以及ARX模型的系数,这一过程通常涉及到最小二乘法或其他优化算法。
5. **RBF参数优化**:优化RBF网络的参数,如基函数的中心和宽度,目的是提高模型的拟合度和预测性能。
6. **模型比较**:论文对比了RBF-ARX模型与全局线性ARX模型,以及局部线性化的RBF-ARX模型和局部线性ARX模型。这表明研究人员不仅关注非线性模型的整体表现,也关注其在特定工作条件下的性能。
7. **有效性验证**:通过比较模型的预测输出和误差,证明了RBF-ARX模型在捕捉倒立摆系统的非线性动态行为方面具有优势,从而验证了模型的有效性。
8. **应用领域**:这类研究对于理解和控制非线性系统,特别是机器人领域的倒立摆控制,具有重要意义,也为其他复杂非线性系统的建模提供了参考。
总结来说,这篇论文深入研究了RBF-ARX模型在处理倒立摆系统非线性建模中的应用,通过参数优化和模型比较,展示了RBF-ARX模型在非线性系统分析和控制中的优越性能。
2008
年
9
月
第
15
卷第
5
期
控制工程
Control
Engineering
of
China
Sep.2008
Vo
l.
I5
,
No.5
文章编号:
1671-7848(2
∞
8)
05-0481-04
RBF-ARX
模型在倒立摆系统建模中的应用
彭辉,廖娟娟
(中南大学信息、科学与工程学院,湖南长沙
41
∞
83)
曹
d
肿
丰饵'
苦
-
...
1ft'
,.,唰
V
萨地
呱啦如
4
挝
、
摘
要:针对直线一级倒立摆控制系统的非线性特性,采用
RBF-ARX
模型对倒立摆系统
的全局非线性动态特性进行建模。讨论了
RBF-ARX
模型结构的选取,模型参数辨识,
RBF
参
数优化等问题。并且分别比较了该倒立摆系统的
RBF-ARX
模型与全局线性
ARX
模型,以及将
RBF-ARX
在某一工作点局部线性化后的模型与局部线性
ARX
模型的预测输出和模型误差,验
证了
RBF-ARX
模型在倒立摆系统建模和辨识中的有效性。
关键词:倒立摆;非线性系统
RBF-ARX
模型
中图分类号'IP
271
文献标识码
A
Modeling of Inverted Pendulum System U sing RBF -ARX Model
PENG
Hui
,
LIAO
Juan-juan
CSchool
of
Inf
Ol
mation
Science
&
Engineering
,
Central
South
University
,
Changsha
410083
,
China)
Abstract:
咀
le
RBF-ARX model is used
to
build the global model of the single inverted pendulum system for representing the nonlinear
d
归
am
lCS.
币
le
problems of the design of the stmcture, identification and
p
缸
'ameter
optimiz
在.ti
on
of RBF-ARX
model
缸
e
discussed.
卫
le
predictive
outputs and modeling errors between the RBF-ARX model and the globallinear ARX model , as well as between a local model
from
estimated
RBF-ARX model and a
locallinear
ARX model of the invelted pendulum
system
盯巳
compared
respectively.
Th
e results show the effectiveness
of RBF-ARX model
to
the modeling of invelted pendulum systems
Key
words:
inverted pendulum; nonlinear system; RBF-ARX model
1
引言
非线性是直线倒立摆系统的一个显著特点。目
前,针对此类倒立摆建立数学模型采用的是牛顿"
欧拉法或拉格朗日法,由于忽略了空气阻力和各种
摩擦等物理因素,导致模型建立不精确。另外,采
用在线辨识模型参数的方法,计算花费较大,实时
在线参数收敛困难。
RBF-ARX
模型是一种针对非线性系统提出的
建模方法,它是高斯径向基函数
(RBF)
网络和线性
ARX
模型结构的复合结构,是一种全局模型,并采
用一种快速收敛的结构化非线性参数优化策略来离
线估计所有的模型参数,因此,它能够有效地避免
在线建模中可能出现的问题,而且在每个采样点的
局部线性化模型也可以很容易地通过该全局模型得
到,这也为分析系统特性提供了方便。
RBF-ARX
模型已经成功应用在热电厂脱硝过程控制中,基于
此模型的预测控制取得了优异的控制效果
[1]
。本文
将
RBF-ARX
模型用于倒立摆系统的建模,给出了
收稿日期
2ω7-06-08;
收修定稿日期:
21
∞
7-07-06
基金项目:国家自然科学基金资助项目
(ω443
∞
8)
建模方法,实际倒立摆系统的建模结果以及与一般
线性
ARX
模型比较的结果。
2
倒立摆控制系统
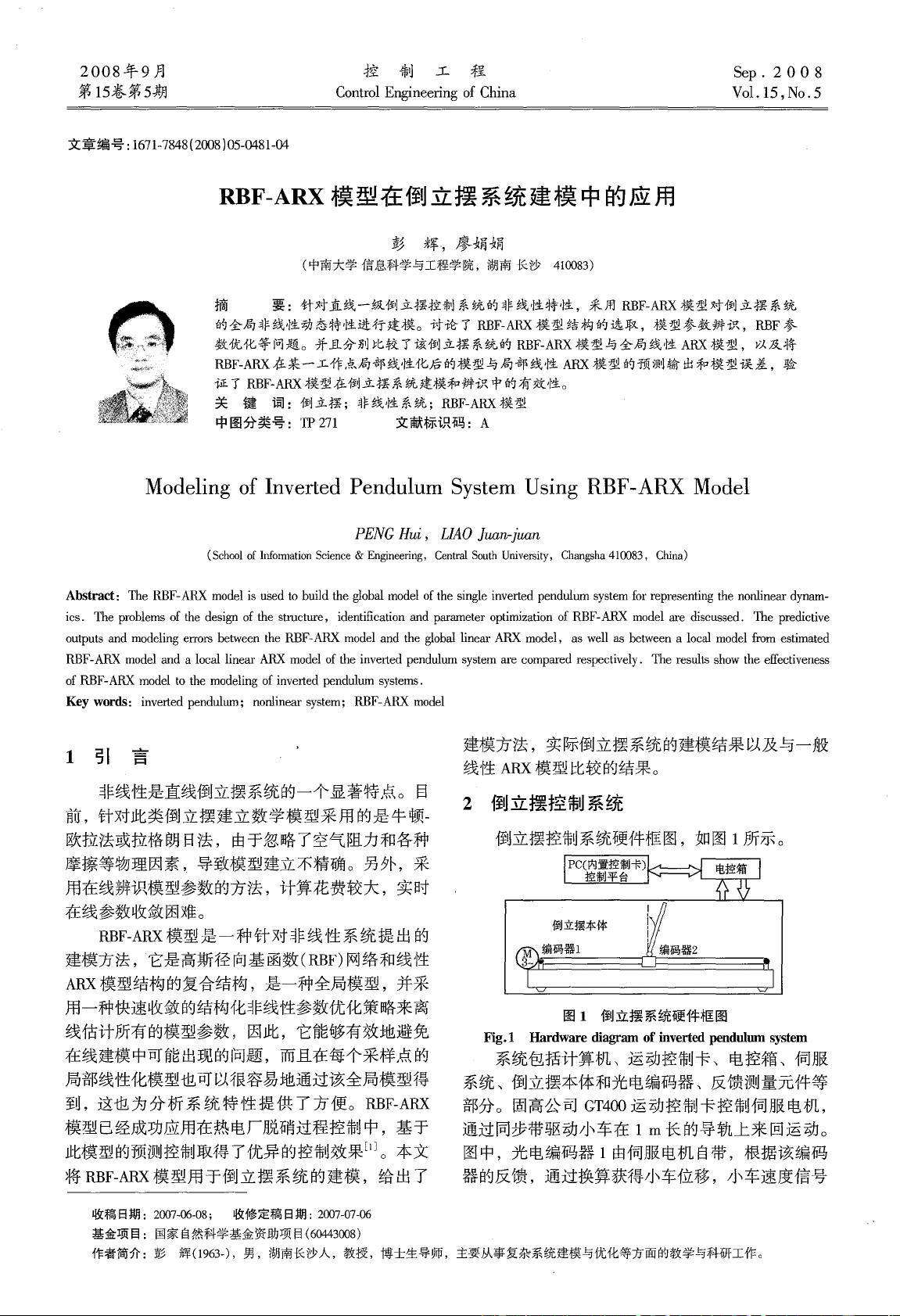
倒立摆控制系统硬件框图,如图
1
所示。
图
1
倒立摆系统硬件框图
Fi
g.l
Har
dware
diagram
of
inverted
pendulum
system
系统包括计算机、运动控制卡、电控箱、伺服
系统、倒立摆本体和光电编码器、反馈测量元件等
部分。固高公司
GT4ω
运动控制卡控制伺服电机,
通过同步带驱动小车在
1
m
长的导轨上来回运动。
图中,光电编码器
1
由伺服电机自带,根据该编码
器的反馈,通过换算获得小车位移,小车速度信号
作者简介:彭
辉(1
963-)
,男,湖南长沙人,教授,博士生导师,主要从事复杂系统建模与优化等方面的教学与科研工作。
下载后可阅读完整内容,剩余4页未读,立即下载
229 浏览量
196 浏览量
252 浏览量
302 浏览量
295 浏览量
点击了解资源详情
122 浏览量
点击了解资源详情

weixin_38605801
- 粉丝: 10
 我的内容管理
展开
我的内容管理
展开







最新资源
- 实现类似百度的邮箱自动提示功能
- C++基础教程源码剖析与下载指南
- Matlab实现Franck-Condon因子振动重叠积分计算
- MapGIS操作手册:坐标系与地图制作指南
- SpringMVC+MyBatis实现bootstrap风格OA系统源码分享
- Web工程错误页面配置与404页面设计模板详解
- BPMN可视化示例库:展示多种功能使用方法
- 使用JXLS库轻松导出Java对象集合为Excel文件示例教程
- C8051F020单片机编程:全面控制与显示技术应用
- FSCapture 7.0:高效网页截图与编辑工具
- 获取SQL Server 2000 JDBC驱动免分数Jar包
- EZ-USB通用驱动程序源代码学习参考
- Xilinx FPGA与CPLD配置:Verilog源代码教程
- C#使用Spierxls.dll库打印Excel表格技巧
- HDDM:C++库构建与高效数据I/O解决方案
- Android Diary应用开发:使用共享首选项和ViewPager
