旋转调制误差补偿:载体角运动对旋转捷联惯导的影响
需积分: 9 41 浏览量
更新于2024-08-12
收藏 442KB PDF 举报
"载体角运动对旋转捷联惯导误差的影响分析 (2014年) - 海军航空工程学院学报 - 徐胜红,施建洪,梁国强"
旋转捷联惯导(RSINS)系统是惯性导航技术的一种,它利用旋转机构来调制陀螺仪和加速度计的误差,从而提高导航精度。2014年的这篇论文深入探讨了载体(即使用惯导系统的平台)的角运动如何影响旋转调制误差补偿的效果。在简要概述了旋转调制误差补偿的基本原理后,研究主要集中在单轴旋转方案上,分析了两种不同的角运动模式:常值旋转和周期旋转。
首先,旋转调制技术的核心在于将惯性元件的漂移误差转换为周期性变化,这样在导航计算时,这些误差可以通过积分操作被平均抵消。然而,载体的角运动状态,如连续的旋转或周期性的翻转,会对这一补偿过程产生影响。
论文中指出,载体的特定角运动模式确实会影响RSINS的误差补偿效果。对于单轴旋转方案,研究发现,相比于其他复杂的角运动模式,采用正反转停的策略,即载体进行正向旋转、反向旋转并停止的组合,能够减小角运动对误差补偿效果的不利影响。这种策略可能是因为其相对简单的角动量变化,使得误差调制更稳定,因此误差补偿的效果更好。
此外,文章强调了在惯性导航系统中,尽管INS具有许多优点,如自主性、全面的导航信息和较强的抗干扰能力,但随着时间的推移,定位误差会不断累积。旋转调制误差补偿技术就是为了解决这个问题,通过系统自身的机制来减轻这种累积误差。
论文还提到,虽然旋转调制方法在理论研究和初步应用中已取得一定的成果,但关于动态环境对其补偿效果的影响尚未得到充分讨论。这篇研究填补了这一空白,为理解RSINS在实际动态条件下的性能提供了有价值的数据和见解。
这篇论文揭示了载体角运动与旋转捷联惯导系统误差补偿之间的复杂关系,并为优化RSINS的导航精度提供了理论依据,对于工程实践中提升惯性导航系统的性能有着重要的参考价值。
2014年 海 军 航 空 工 程 学 院 学 报海 军 航 空 工 程 学 院 学 报 2014
第29卷 第5期 Journal of Naval Aeronautical and Astronautical University Vol.29 No.5
文章编号:1673-1522(2014)05-0405-05 DOI: 10.7682/j.issn.1673-1522.2014.05.002
载体角运动对旋转捷联惯导误差的影响分析
徐胜红,施建洪,梁国强
(海军航空工程学院控制工程系,山东 烟台 264001)
摘 要:旋转捷联惯导系统采用旋转调制误差补偿技术对陀螺仪和加速度计误差进行调制,可以提高系统导航精
度。在简要分析旋转调制误差补偿机理基础上,研究了单轴旋转方案中载体常值旋转和周期旋转2 种角运动模式
对导航误差的影响。结果表明:载体特定角运动对旋转捷联惯导的误差补偿效果有一定影响,且单轴正反转停方
案中误差补偿效果所受影响相对较小。
关键词:捷联惯导;旋转调制;误差补偿
中图分类号:V249.322;U666.12 文献标志码:A
惯性导航系统(Inertial Navigation System,INS)具
有工作自主性强、提供导航信息较为全面、抗干扰能
力强、适用条件宽等独特优点,但也存在定位误差随
时间累积的缺陷,而通过旋转调制等系统误差自动补
偿技术可以较好地提高惯导系统的精度
[1]
。旋转调制
误差补偿技术的基本思想是将惯性元件漂移等误差
量通过旋转机构调制成某种周期变化的形式,在导航
解算过程中利用积分运算自动将误差平均抵消。
目前,国内外众多科研机构和学者对基于旋转调
制方法的捷联惯导误差自动补偿技术进行了大量的
研究
[2-4]
,部分成果也得到了初步应用。在众多的研究
中,针对旋转捷联惯导系统(Rotating Strap-down INS,
RSINS)原理和静态导航误差的分析较多
[5-6]
,关于动态
环境对误差补偿效果的影响却鲜有讨论。针对单轴
旋转方案,通过建模和仿真专门分析了载体角运动对
旋转调制误差补偿效果的影响。结果表明:载体特定
的连续角运动状态对旋转捷联惯导的误差补偿有一
定影响,且在正反转停方案中,这种影响相对较小。
1 旋转捷联惯导误差补偿原理
在捷联式惯导系统中,旋转调制误差自动补偿技
术在本质上是通过周期性地改变姿态矩阵,使系统中
缓慢变化的误差在转动周期内均值接近 0,从而减小
系统误差的积累,提高导航精度
[7]
。
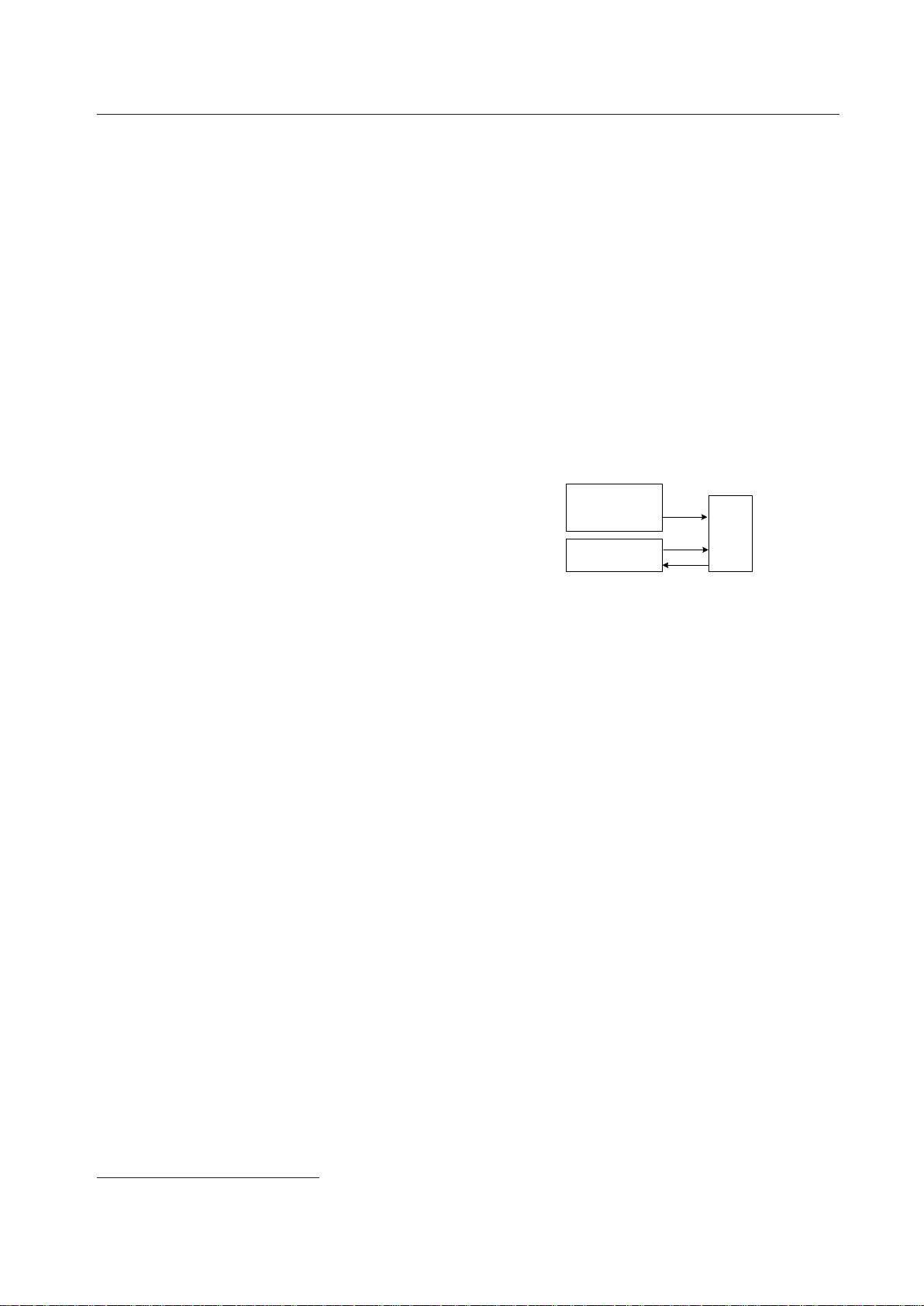
旋转捷联惯导系统基本结构原理如图1所示
[8]
:惯
性测量组合(IMU)安装在按一定规律旋转的平台上,
则 IMU 测得的是旋转平台相对惯性坐标系的角速度
和比力信息。导航计算机接收该信息以及平台相对
载体的角位置信息,完成导航解算。
图1 旋转捷联惯导系统结构原理示意图
Fig.1 Schematic of RSINS framework
令旋转平台坐标系为 r ,假定初始时刻该平台系
与载体系重合。忽略陀螺仪和加速度计安装误差,同
时令
r
系内陀螺漂移为
ε
i
(i = x,y,z)
、加速度计零偏为
∇
i
(i = x,y,z)
。当平台绕台体
z
轴按角速率
ω
b
br,z
旋转时,
有
ω
b
ir
= C
b
r
ω
r
ir
= ω
b
ib
+ ω
b
br
。
(1)
式(1)中:
i
表示惯性系;
b
表示载体系;角速度
ω
的下
标表示相对旋转的坐标系,上标表示是在对应坐标系
内的分量;
C
b
r
是从
r
系到
b
系的变换方向余弦矩阵;
ω
b
br
=[0 0 ω
b
br,z
]
T
。
即:
ω
b
ib
= C
b
r
ω
r
ir
- ω
b
br
。
假设
ω
b
br,z
是准确的,则角速度误差有以下关系:
δω
b
ib
= C
b
r
δω
r
ir
。
(2)
由于
C
b
r
=
é
ë
ê
ê
ê
ê
ù
û
ú
ú
ú
ú
cos ω
b
br,z
t -sin ω
b
br,z
t 0
sin ω
b
br,z
t cos ω
b
br,z
t 0
0 0 1
及
δω
r
ir
=
é
ë
ê
ê
ù
û
ú
ú
ε
x
ε
y
ε
z
,则
δω
b
ib
=
é
ë
ê
ê
ê
ê
ù
û
ú
ú
ú
ú
ε
x
cos ω
b
br,z
t - ε
y
sin ω
b
br,z
t
ε
x
sin ω
b
br,z
t + ε
y
cos ω
b
br,z
t
ε
z
。 (3)
同样,可以得到:
收稿日期:2014-04-22; 修回日期:2014-07-16
作者简介:徐胜红(1974-),男,副教授,博士。
惯性测量组合
旋转平台机构
光学陀螺
导航
计算机
测量数据
平台信息
协调指令
加速度计
下载后可阅读完整内容,剩余4页未读,立即下载
149 浏览量
2013-05-06 上传
2022-07-13 上传
2024-10-28 上传
2024-10-28 上传
2023-08-05 上传
2023-05-22 上传
2023-05-25 上传
2024-11-03 上传

weixin_38528680
- 粉丝: 8
- 资源: 875
 我的内容管理
展开
我的内容管理
展开







最新资源
- bingyan-summer-camp2018:2018冰岩程序组夏令营
- workBench所需Jar包.zip
- navmesh:一个用于使用navmeshes在JS中进行路径查找的插件,其中包含Phaser 3和Phaser 2的包装
- CI-Setup
- 我的引导项目
- ignite-desafio01-trilha--reactjs
- mysql代码-我的mysql练习
- WeatherApp:使用开放式天气地图服务显示用户所选邮政编码的天气预报的Android应用。 使用主细节流程来支持平板电脑和手机。 实现通过其访问数据的ContentProvider
- java学生成绩管理系统 初学者.zip
- CIS4930:Web Dev Frameworks课程工作于2021年Spring
- GoogleCloudVisionOCR:有关如何使用Python 3 + Google Cloud Vision API完成OCR的示例
- mysql代码-面试题第二关
- UNQ-G14-TPIntegradorOBJ
- library_database:图书馆数据库
- google-spreadsheet-example:C#でAPIを使用してGoogleスプレッドシートにデータを书き込む
- commit4::video_game:2017年Game Off冠军
