小强ROS机器人操作系统教程与实践指南
"小强ROS|XQ-4Pro机器人用户手册第二版(蓝鲸智能),涵盖从开始使用到高级教程的全方位指南,包括网络设置、产品组装、状态检查、远程控制、视频传输等基本操作,以及ROS入门、惯性导航、三维建模、避障、SLAM算法应用等内容。"
本文将对《机器人操作系统ROS浅析》进行深入探讨,重点基于小强ROS|XQ-4Pro机器人用户手册,详细介绍ROS在实际机器人系统中的应用和学习路径。
首先,ROS(Robot Operating System)是机器人领域广泛使用的开源操作系统,它提供了一个框架,使得开发者可以轻松地构建和集成各种机器人硬件和软件组件。小强ROS机器人系统中,用户需要了解的基本操作包括设置网络、产品组装、状态检查,确保机器人能够正常运行。此外,通过远程遥控和视频传输功能,用户可以实现对机器人的远程监控和控制。
手册的第二部分,ROS入门手册,引导初学者了解ROS的核心概念,如节点(Node)、消息(Message)、服务(Service)和参数(Parameter)等,同时提供了如何配置和使用ROS环境的步骤。教程逐步深入,涵盖了从基础操作到复杂应用的各个方面:
- 教程(2)介绍了蓝鲸智能的开源软件仓库和ROS开机启动任务配置,使用户能够自定义机器人的启动行为。
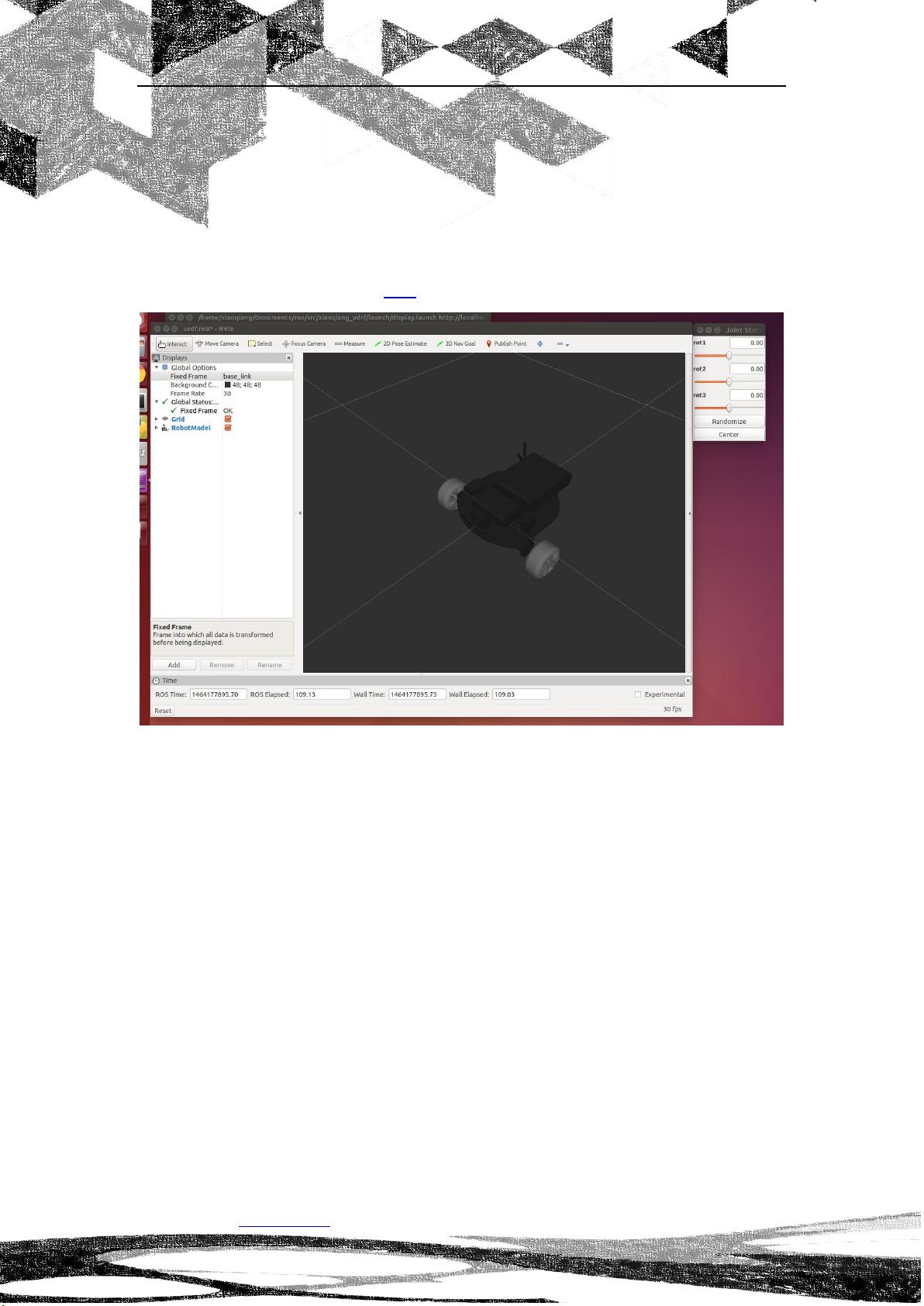
- 教程(3)至(10)涉及ROS中的传感器集成,如rviz中的模型显示、惯性导航、视觉里程计、ORB_SLAM2、kinectROS驱动等,这些都是机器人自主移动的关键技术。
- 教程(11)和(12)讲解了如何校准和控制传感器,提高系统的稳定性和精度。
- 教程(13)至(15)涵盖了避障、手动控制和三维建模,这些是机器人在现实世界中安全有效行动的必备技能。
- 教程(16)至(18)则涉及到更高级的SLAM算法和激光雷达的应用,这对于大范围定位和地图构建至关重要。
手册的后续部分,包括视觉导航路径编辑器、远程协助功能、障碍物识别演示、履带车中的视觉导航应用以及Cartographer激光雷达SLAM算法的安装和测试,展示了ROS在实际应用场景中的综合能力。
这个手册不仅是一个全面的ROS教程,也是实践者提升机器人技术的宝贵资源。通过学习和实践其中的内容,开发者不仅可以掌握ROS的基本操作,还能深入理解机器人自主导航、感知和控制的复杂技术,为开发更加智能化的机器人系统奠定坚实的基础。
小强 ROS|XQ-4 Pro 机器人用户手册第二版 ( 蓝鲸智能 )
13
WebSite: http://www.bwbot.org Community: http://community.bwbot.org
教程(2)___蓝鲸智能开源软件仓库的使用和 ROS 开机启动
任务的配置
小强的所有软件源码都共享在蓝鲸智能的开源仓库里,任何人任何组织都可以自由下载
使用或进行二次开发,软件仓库地址为:https://github.com/BlueWhaleRobot
对于小强用户,开源仓库中的软件可以直接 git clone 到小强的 ROS 工作目录里,然后
就 就 可 以 直 接 用 ROS 的 工 具 链 catkin_make 编 译 使 用 。 小 强 的 ROS 工 作 目 录
为:/home/xiaoqiang/Documents/ros/src
下文将以开源仓库中的 startup 软件包为例,演示开源仓库的完整使用过程。
一、STARTUP 软件包功能介绍
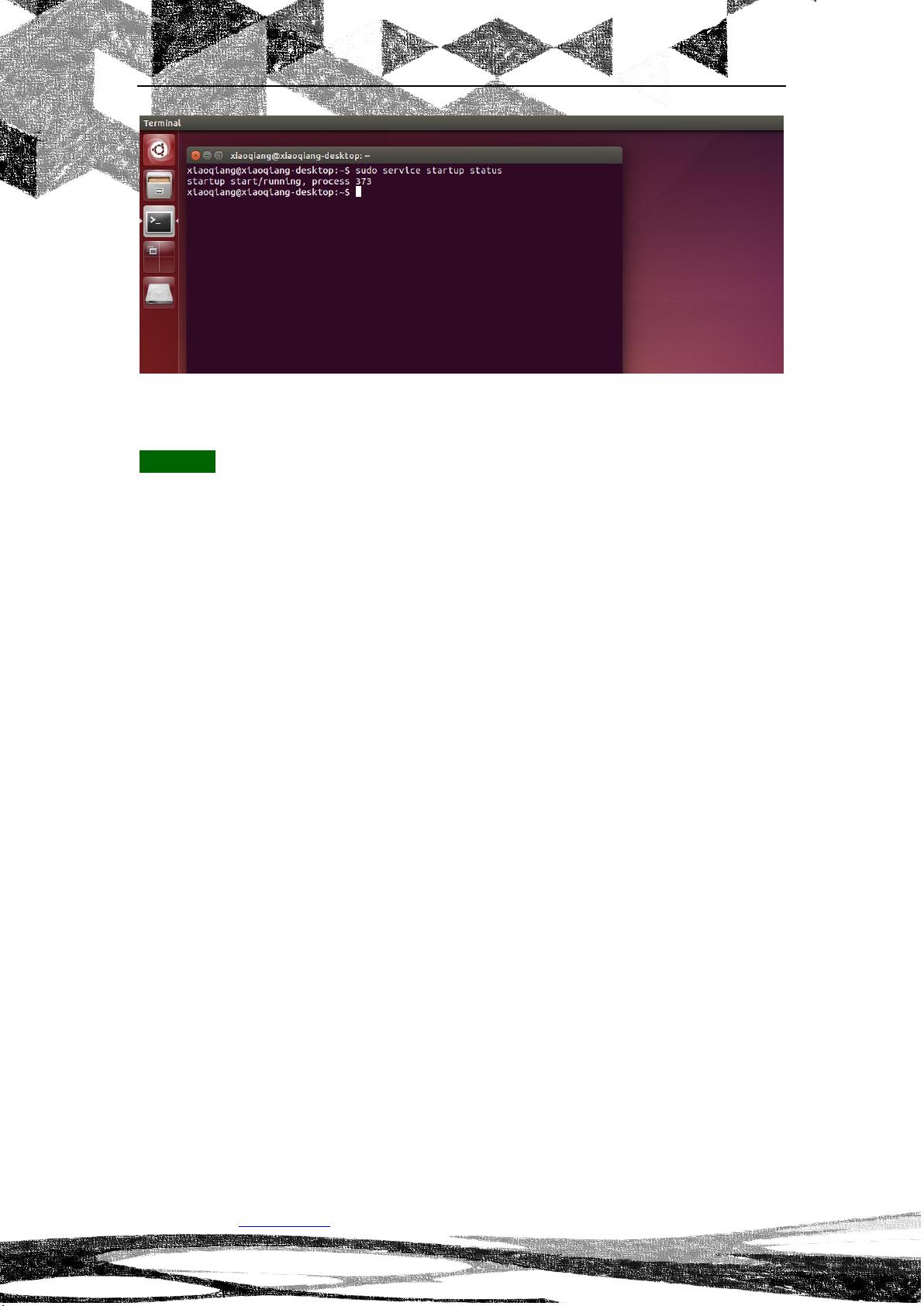
小强主机开机后,会自动启动名字为 startup 的 linux 服务脚本,startup 服务脚本运行时
会去启动 startup 软件包中的 startup.launch 文件 在 ubuntu 系统中注册的复制品。因此我们
通过修改 startup 软件包中的 startup.launch 文件,然后将这个文件在 ubuntu 系统中注册为
startup 服务,就能控制小强主机的开机启动任务了。
二、在小强主机中下载安装 STARTUP 软件包
a.在本地遥控端 ssh 连接小强主机,参考上篇教程的配置
ssh xiaoqiang@192.168.x.x
b.进入小强 ROS 工作目录,查看是否有 startup 文件夹
cd Documents/ros/src/
ls
如果存在,说明已安装好 startup 软件包,可以直接进行下面的操作三
如果想和开源仓库同步更新这个 startup 软件包,请输入如下命令(2016 年 10 月之后购买的
用户不用更新)
cd startup
git pull origin
cd ..
c.从蓝鲸智能开源软件仓库中下载 startup 软件包
git clone https://github.com/BlueWhaleRobot/startup.gitcd ..
catkin_makecd src
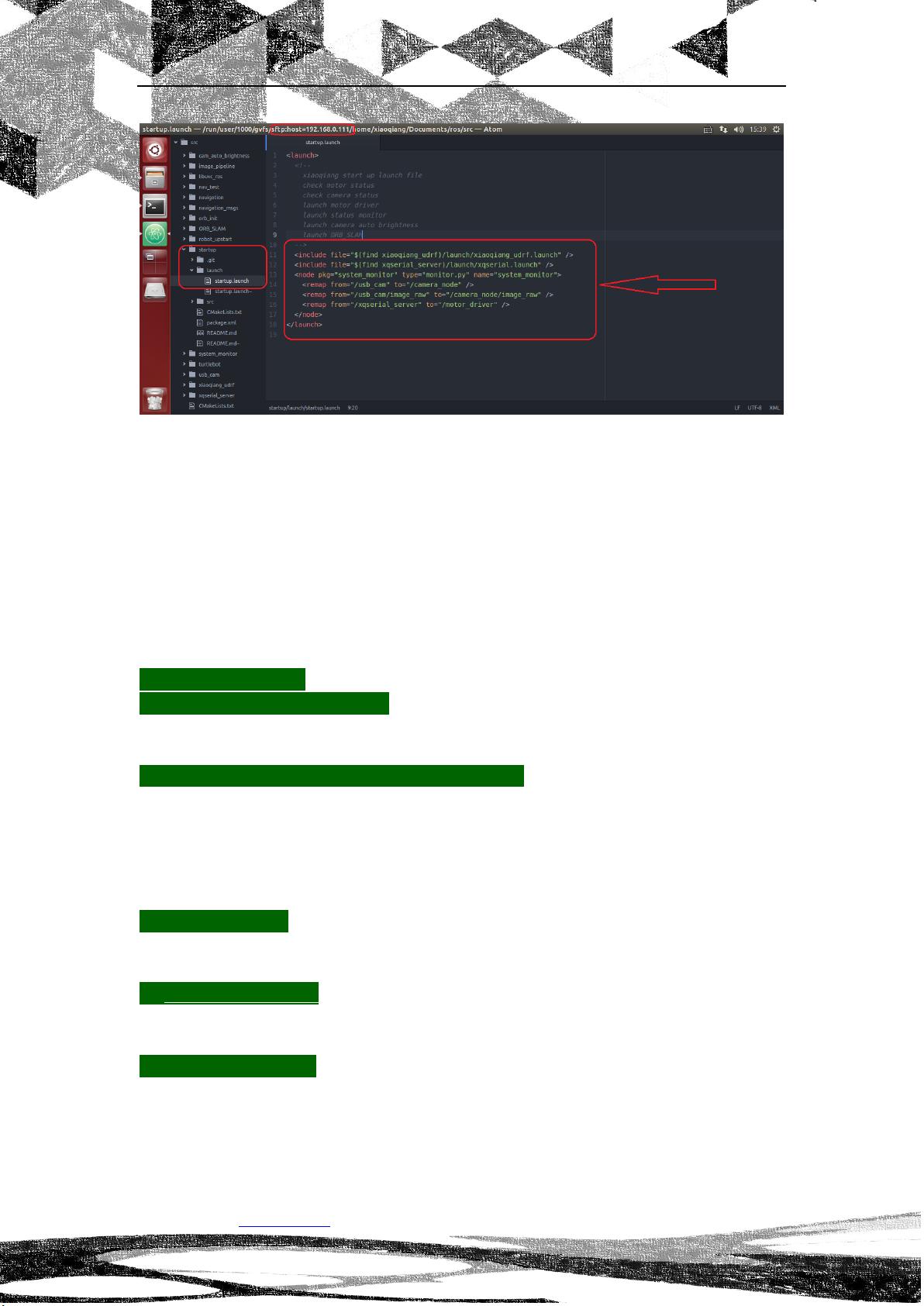
三、修改软件包中 LAUNCH 文件夹内的 STARTUP.LAUNCH 文件
利用上篇教程安装的 atom 编辑器,在本地遥控端直接编辑这个文件(需要远程访问小
强的主机文件目录,请参考上篇基础操作教程进行配置)
剩余80页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2021-09-29 上传
2021-10-18 上传
2019-02-22 上传
2018-05-23 上传
2022-07-15 上传

闲逸居士
- 粉丝: 42
- 资源: 7
 我的内容管理
展开
我的内容管理
展开







最新资源
- Tramwrecked:C#中的控制台应用程序文本冒险
- labview截取屏幕位置、移动程序位置、控制鼠标点击位置代码
- issue-tracker:W3C webperf 问题跟踪器
- 429108.github.io
- webpage-6
- Szoftver公开
- AIJIdevtools-1.4.1-py3-none-any.whl.zip
- Extended Java WordNet Library:extJWNL是一个Java库,用于处理WordNet格式的词典。-开源
- starting-requirejs:了解更多关于 RequireJS
- DATASCIENCE_PROJECTS:我所有的数据科学著作
- AIOrqlite-0.1.1-py3-none-any.whl.zip
- Bibliotheque_binome-
- deep-dive-craps-android
- PS_Library_cpp:PS的库。 C ++版本
- pashiri-hubot:一个hubot脚本,通过提到hubot随机决定购买谁
- [008]vc_串口通讯.zip上位机开发VC串口学习资料源码下载
