永磁交流伺服电机编码器与转子相位对准详解及其重要性
需积分: 5 84 浏览量
更新于2024-08-03
2
收藏 211KB DOC 举报
伺服电机转子与编码器位置对准校正是一项关键的维护任务,尤其是在永磁交流伺服电机的应用中。该过程的主要目的是为了实现矢量控制,也就是所谓的磁场定向控制(FOC)。FOC的核心在于确保伺服电机的d轴励磁分量与q轴出力分量解耦,这样可以使得定子绕组产生的电磁场始终与转子的永磁场正交,从而实现类似直流电机的性能,即具有良好的动态响应和高精度控制。
在伺服电机中,编码器的作用是测量转子的位置和速度,其相位与转子磁极相位的零点对齐至关重要。编码器通常通过检测a相(U相)的反电势波形的电角度相位来实现这一对齐。电角度反映了转子坐标系的d轴(直轴)与定子坐标系的a轴(U轴)或α轴之间的夹角,这对于理解电机的工作原理和进行精确调整非常重要。
为了达到相位对齐,传统的方法是采用欧美厂商常用的空载定向技术。通过给电机的绕组施加低于额定电流的直流电流,转子在没有外力作用下会自然地定位到与初级电磁场波形峰值中心(特定角度)相对应的,且与转子磁极磁矩相位差为0度的平衡位置。这个过程中,空载定向时,a相(U相)中心与d轴(在次级磁体坐标系中)会有90度电角度的差异,而在FOC控制下,a相中心则与q轴对齐。
对准过程完成后,伺服电机的相电流波形将与相反电势波形保持一致,确保了d轴和q轴的同步工作,从而提高了电机的性能和控制精度。正确对齐编码器和转子磁极相位不仅影响电机的运行效率,还直接影响到应用在自动化、机器人、精密机械等领域的运动控制质量。因此,对于伺服电机系统的维护人员来说,掌握这一校准方法是必不可少的技能。
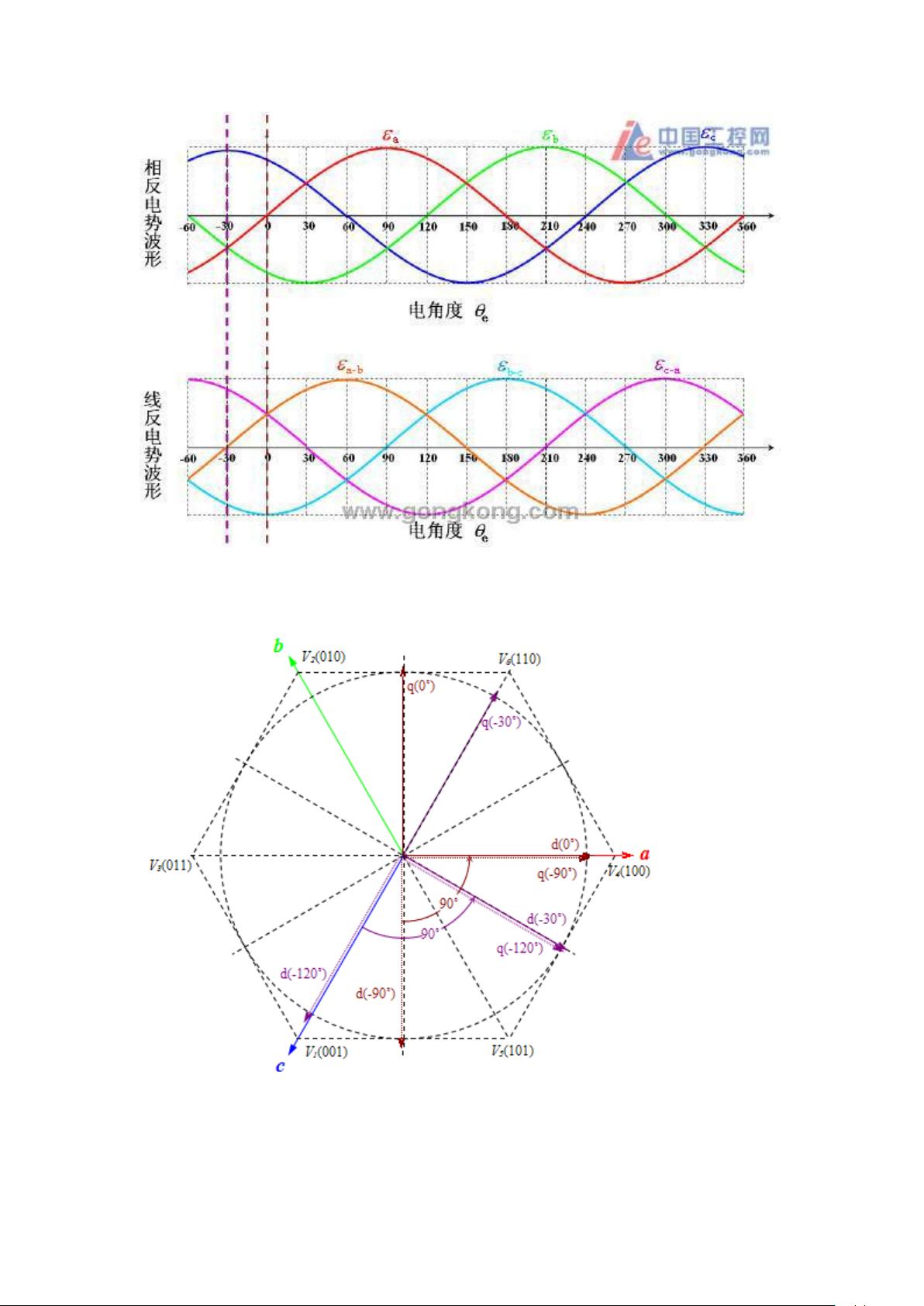
图 5
上述两种转子定向方法在 dq 转子坐标系和 abc(UVW)或 αβ 定子坐标系中的矢量关系如
图 6 所示:
图 6
图中棕色实线所示的 d 轴与 a 轴(U 轴)或 α 轴对齐,即对齐到电角度 0 点。对齐方法是
对电机绕组施加电角度相位固定为-90 度的电流矢量,如图中棕色虚线所示,空载下电机转
剩余13页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
134 浏览量
1306 浏览量
134 浏览量

yu1037764299
- 粉丝: 154
 我的内容管理
展开
我的内容管理
展开







最新资源
- Ractor:Redis驱动的分布式Actor模型与持久化解决方案
- Spotify个人数据项目:音频播放器开发实战
- 实现图片五屏轮播的手风琴jQuery特效代码
- Grizly-crx插件: 一款提升即时链接分享体验的扩展程序
- Python与QT技术打造3x3缩略图生成工具
- 获取最新版Flash Player压缩文件
- 《战争与和平》中单词关联分析的Python程序
- 制冷与空调装置结构详细解析
- 福建阳光城新中式高层洋房设计方案亮点解读
- FontoXML平台的ESLint配置教程
- Python动画演示:汉堡版Maccormack方法
- PSR-11: 构建PHP依赖注入容器的开源标准
- 全面掌握Python爬虫开发:requests、数据解析与Scrapy框架应用
- 仿Office助理的VC动画小人源码发布
- 360App加密加固助手:官方免费版安卓Apk加固
- µhtml-intents:将hyperHTML引入µhtml的实用工具
