伺服电机编码器与转子磁极对齐技术解析
版权申诉
PDF格式 | 299KB |
更新于2024-08-03
| 26 浏览量 | 举报
"伺服电机编码器与转子磁极相位对齐方法.pdf"
这篇文档主要讲解了伺服电机编码器与转子磁极相位对齐的重要性及其实施方法,特别是针对永磁交流伺服电机。伺服电机在众多技术领域,如自动化设备、机器人、精密定位等,都有广泛应用。编码器是电机控制系统中的关键组件,它用于精确地检测电机的转速、位置和方向,而转子磁极相位的对齐则是确保电机高效、稳定运行的关键步骤。
伺服电机的编码器相位与转子磁极相位对齐的主要目的是实现矢量控制,即FOC(Field Oriented Control),这种控制方式能够使电机的d轴(励磁分量)和q轴(出力分量)解耦,使得电机的电磁场与转子的永磁场保持正交,从而提供最佳的扭矩输出,模拟直流电机的特性。理想状态下,电机的"相电流"波形应与"相反电势"波形保持一致,这样可以确保电机的最佳性能。
实现这一目标的方法通常涉及到实时检测反电势波形的电角度相位,通过这个信息来生成对应的相电流波形。电角度指的是转子坐标系的d轴与定子坐标系的a轴或α轴之间的夹角,同时也对应着a相(U相)相反电势波形的正弦相位。因此,编码器相位的对齐实际上是对编码器信号与反电势波形相位的匹配。
在实际操作中,一种常见的对齐方法是采用直流电流定向法,特别是在欧美厂商中广泛应用。这种方法是通过向电机绕组施加一个小于额定电流的直流电流,使得转子在没有外部负载的情况下,由于电磁场与永磁场的相互作用,自动定位到两者相差0度相位的平衡位置。此时,编码器的相位与转子磁极的相位对齐。
对比空载定向和FOC控制下的电机状态,可以看出,在FOC控制下,a相(U相)的电流中心与转子的q轴对齐,而在空载定向时,a相(U相)中心与d轴对齐,这实际上意味着转子磁体坐标系的d轴在空载定向时会左移90度电角度,与FOC控制下q轴的位置重合,实现了转子坐标系与定子坐标系之间的正确对齐。
在电机绕组中,为了实现相位对齐,电流的方向通常是bc相(VW相)输入,a相(U相)输出,考虑到b相(V相)和c相(W相)是并联的,电流会同时流经这两个相。这样的电流分布可以帮助电机达到理想的相位对齐状态,从而实现高效的FOC控制。
该文档深入探讨了伺服电机编码器与转子磁极相位对齐的原理和方法,这对于理解伺服电机的工作机制以及如何优化其性能至关重要。对于从事自动化、电机控制、机器人等领域的人来说,这份资料提供了宝贵的实践指导。通过学习和应用这些知识,开发者和工程师可以更好地掌握伺服电机的控制技术,提高系统性能和精度。
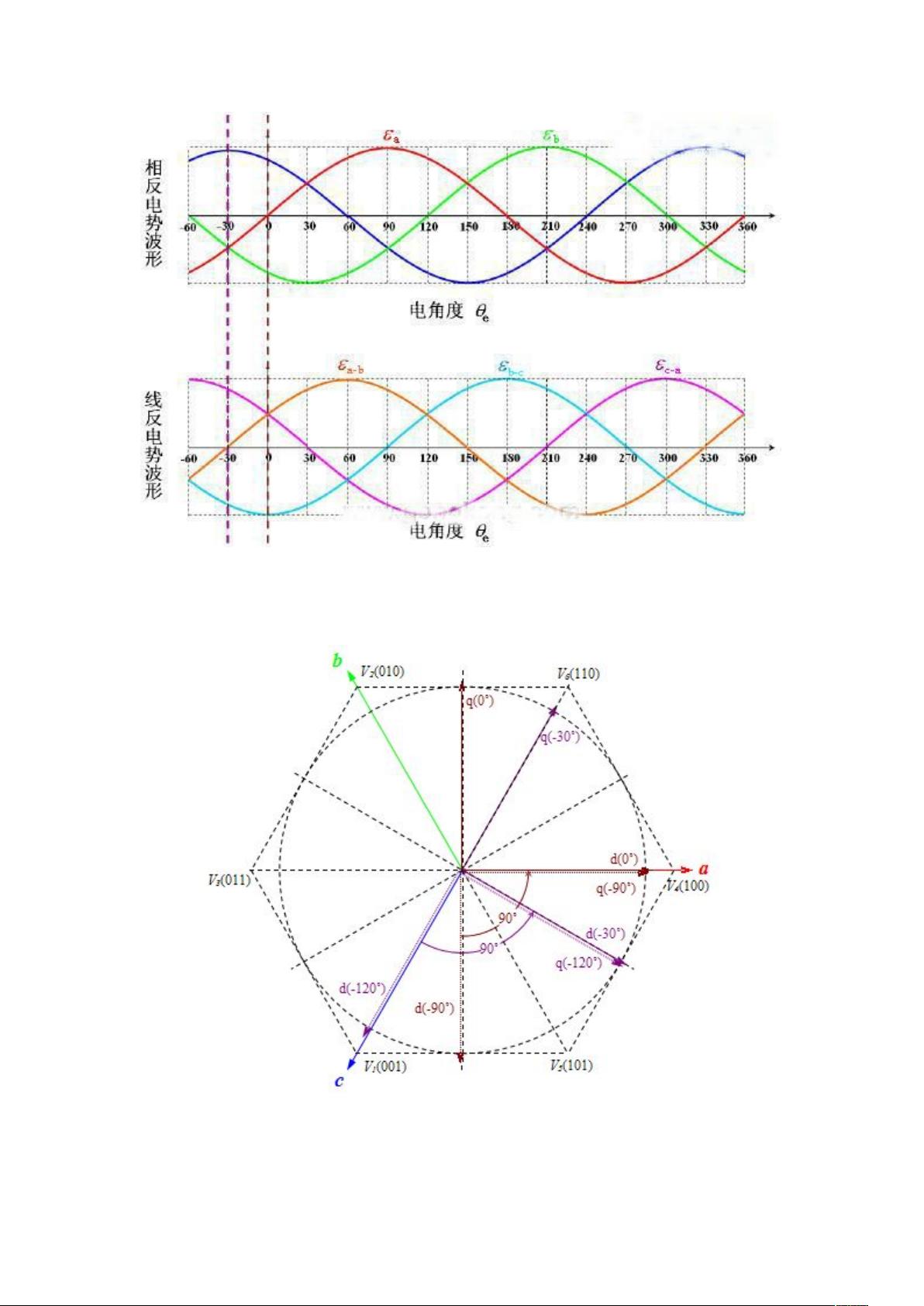
图 5
上述两种转子定向方法在 dq 转子坐标系和 abc(UVW)或αβ定子坐标系中的矢量关系如图
6 所示:
图 6
图中棕色实线所示的 d 轴与 a 轴(U 轴)或α轴对齐,即对齐到电角度 0 点。对齐方法是对
电机绕组施加电角度相位固定为-90 度的电流矢量,如图中棕色虚线所示,空载下电机转子
剩余12页未读,继续阅读
相关推荐






CrMylive.
- 粉丝: 1w+
 我的内容管理
展开
我的内容管理
展开







最新资源
- Web远程教学系统需求分析指南
- 禅道6.2版本发布,优化测试流程,提高安全性
- Netty传输层API中文文档及资源包免费下载
- 超凡搜索:引领搜索领域的创新神器
- JavaWeb租房系统实现与代码参考指南
- 老冀文章编辑工具v1.8:文章编辑的自动化解决方案
- MovieLens 1m数据集深度解析:数据库设计与电影属性
- TypeScript实现tca-flip-coins模拟硬币翻转算法
- Directshow实现多路视频采集与传输技术
- 百度editor实现无限制附件上传功能
- C语言二级上机模拟题与VC6.0完整版
- A*算法解决八数码问题:AI领域的经典案例
- Android版SeetaFace JNI程序实现人脸检测与对齐
- 热交换器效率提升技术手册
- WinCE平台CPU占用率精确测试工具介绍
- JavaScript实现的压缩包子算法解读
