三菱FX1N-PLC控制的JXS-A型机械手系统设计
189 浏览量
更新于2024-06-24
收藏 962KB DOC 举报
本文档是关于基于三菱FX1N-PLC的JXS-A型机械手控制系统设计的毕业设计论文,主要涵盖了系统硬件电路、I/O地址分配、控制程序设计等多个方面。
在控制系统的设计中,硬件电路是基础,主要包括电源接线、电机驱动器与PLC的连接、PLC的输入输出接线以及直流电动机的正反转控制。220V电源接线确保了系统供电,步进电动机驱动器与PLC的COM端接线用于接收PLC发出的指令,控制步进电机的运动。PLC的输出端接线用于驱动执行机构,如电磁铁等,而输入端接线则用于接收传感器等设备提供的状态信息。直流电动机的正反转控制接线使得电机可以根据需要进行方向切换,实现机械手的灵活运动。
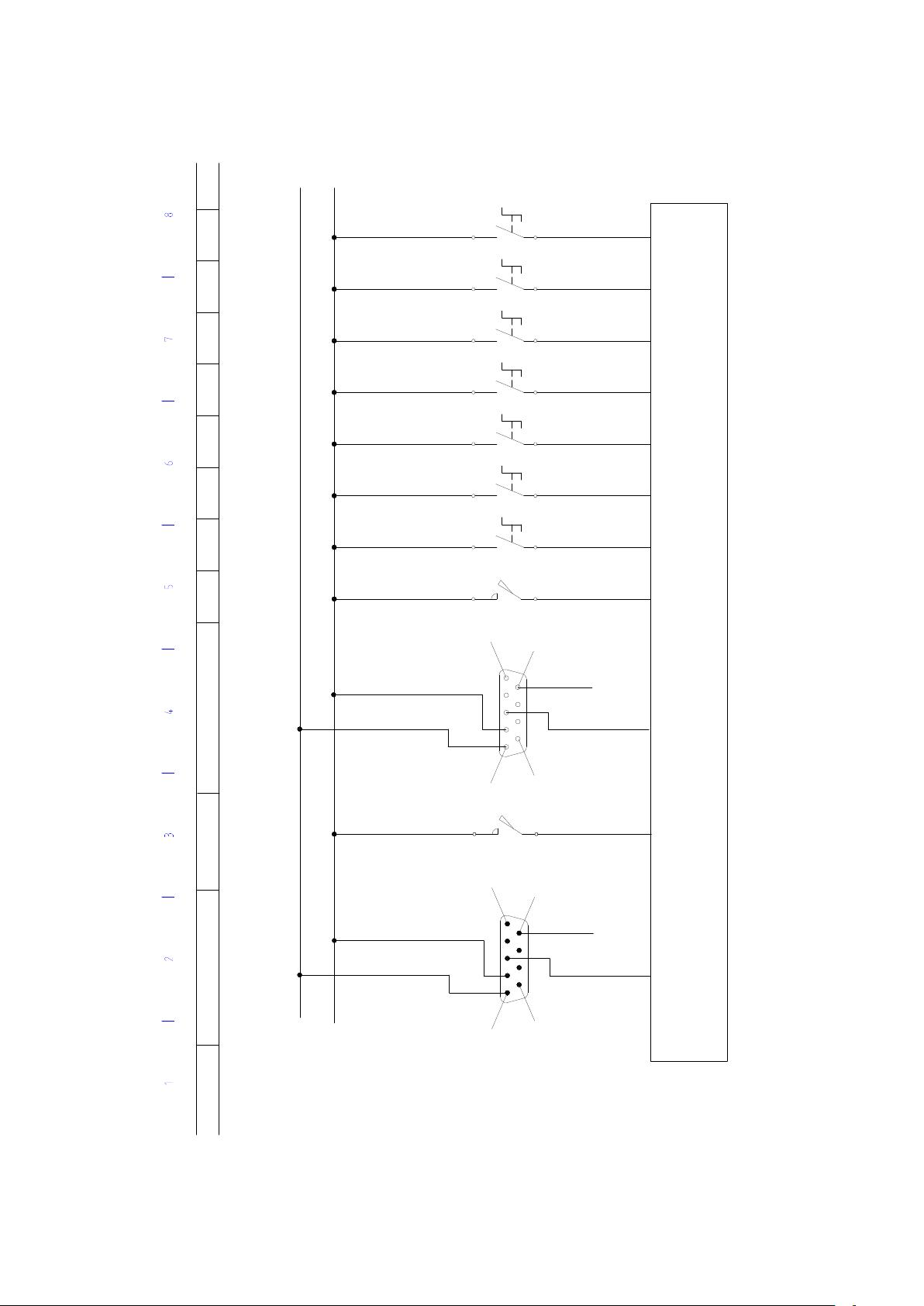
传感器位置分配图描述了各传感器在系统中的布局,这些传感器可能包括限位开关和压力继电器,它们用于检测机械手的位置和运行状态,提供反馈给PLC进行决策。
I/O地址分配是PLC编程的关键部分,输入分配表列出了各个输入地址对应的功能,如X0用于C235传感器,X1表示前限位,X2用于光栅尺插头等,这些输入信号帮助PLC识别机械手的当前位置和工作模式。输出分配表则显示了输出地址与其功能的对应关系,如Y0控制Y轴脉冲,Y1可能控制X轴的运动。
控制程序设计部分包括了自动或手动控制程序的选择和初始化设置,手动控制程序设计允许操作员直接对机械手进行操作,而自动控制程序则依据预设逻辑运行。高速计数器用于精确跟踪电机的旋转次数,方向及手爪松紧输出程序则控制机械手的手爪打开和闭合动作。这些程序都是通过GX Developer软件,使用梯形图语言编写。
课程设计小结是对整个设计过程的总结,强调了系统的特性,如紧凑的结构和平稳的运动,并指出控制系统的中心是三菱FX1N PLC,它通过接收和处理各种输入信号,驱动相应的输出设备,实现对机械手的精准控制。
关键词涉及的步进电机提供了精确的定位,气压系统用于手爪的松紧控制,限位开关和压力继电器则起到了安全保护和定位的作用。PLC(可编程逻辑控制器)是整个系统的大脑,通过GX Developer进行编程,确保了系统的高效稳定运行。
这个毕业设计全面展示了基于PLC的自动化控制系统的设计思路,涵盖了硬件电路设计、软件编程、系统集成和调试等多个环节,对于理解PLC在工业控制中的应用具有很高的参考价值。
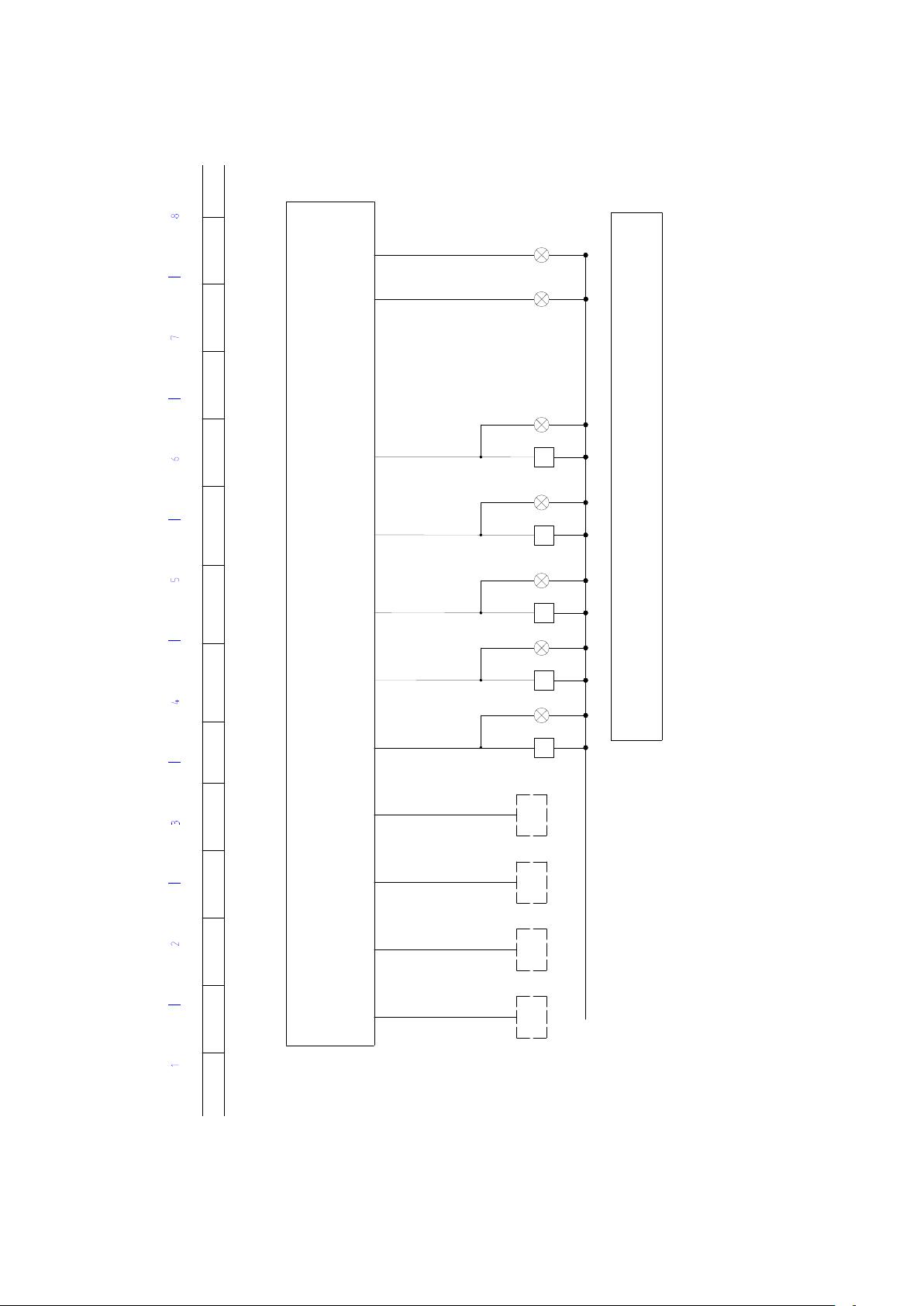
1.3 PLC 输出端接线
KA1
左转
PLC 输出信号
KA2
右转
KA3
爪左转
KA4
爪右转
Y4 Y5
Y6
Y7
Y10
Y11
Y12
Y13
夹紧
报警1
报警2
FX1N-40MT PLC
左转
右转
爪左转
爪右转
夹紧
报警1
报警2
控制面板输出监控区
24V+
Y3
Y2
Y1Y0
CP1
CP2
DIR1
DIR2
方向2方向1脉冲2脉冲1
F1
SH-2024A
SH-2024A SH-2024A
SH-2024A
剩余25页未读,继续阅读
442 浏览量
354 浏览量
332 浏览量
点击了解资源详情
点击了解资源详情
2021-05-11 上传
2021-03-13 上传
2021-10-13 上传
113 浏览量

matlab大师
- 粉丝: 2861
 我的内容管理
展开
我的内容管理
展开







最新资源
- MATLAB实现ART与SART算法在医学CT重建中的应用
- S2SH整合版:快速搭建Struts2+Spring+Hibernate开发环境
- 托奇卡项目团队成员介绍
- 提升外链发布效率的SEO推广神器——搜易达网络推广大师v2.035
- C#打造简易记事本应用详细教程
- 探索虚拟现实地图VR的奥秘
- iOS模拟器屏幕截图新工具
- 深入解析JavaScript在生活应用开发中的运用
- STM32F10x函数库3.5中文版详解与应用
- 猎豹浏览器v6.0.114.13396 r1:安全防护与网购敢赔
- 掌握JS for循环输出的最简洁代码技巧
- Java入门教程:TranslationFileGenerator快速指南
- OpenDDS3.9源码解析及最新文档指南
- JavaScript提示框插件:鼠标滑过显示文章摘要
- MaskRCNN气球数据集:优质图像识别资源
- Laravel日志查看器:实现Apache多站点日志统一管理
