三菱FX1N-PLC控制的JXS-A型机械手系统设计
174 浏览量
更新于2024-06-23
收藏 915KB DOC 举报
"本文档是关于毕业设计的论文,详细阐述了基于三菱FX1N-PLC的JXS-A型机械手控制系统的构建与设计。该系统采用关节式结构,具备五个自由度,并利用PLC进行精准控制。设计涵盖了硬件电路、传感器位置、I/O地址分配、控制程序设计等多个方面,旨在实现机械手的高效自动化操作。"
在本次毕业设计中,设计者主要关注了一个基于三菱FX1N系列PLC的JXS-A型机械手控制系统。该系统采用了先进的机械设备,如步进电机和直流电机,来确保机械手在X轴、Y轴、底盘、手爪轴以及手爪上的精确运动。步进电机用于X轴和Y轴的精细定位,而直流电机则驱动转盘轴和手爪轴的旋转。手爪的开合则由气压泵控制,实现了灵活的抓取动作。
硬件电路设计部分详细介绍了220V电源接线、步进电动机驱动器与PLC的COM端连接、PLC的输入和输出端口接线,以及直流电动机正反转的控制线路。这些电路设计确保了系统能够正确接收和发送信号,从而控制各个执行机构的动作。
在传感器位置分配图中,设计者列出了各个输入地的功能,如前限位、后限位、光栅尺插头等,用于检测机械手的位置和状态,以便PLC根据这些信息做出相应反应。同时,还展示了输出地址的功能,如Y轴脉冲、电磁铁控制等,这些输出信号驱动电机和其他执行元件,实现机械手的运动控制。
在I/O地址分配及中间继电器分配中,设计者清晰地标明了输入和输出地址的用途,例如,X0用于C235,X6用于自动控制,而Y0则用于Y轴脉冲等。中间继电器的分配则进一步细化了系统的控制逻辑,使得复杂的控制过程可以通过PLC的简单编程来实现。
控制程序设计部分包括了自动或手动控制程序的选择和初始化设置,手动控制程序设计用于直接操作机械手,而自动控制程序则依赖于预设的逻辑和传感器数据。高速计数器用于实时监测电机的运动,确保精度。方向及手爪松紧输出程序则涉及到机械手的运动方向和手爪的松紧控制,这些都是系统中的关键环节。
最后,设计者进行了课程设计小结,总结了整个控制系统的设计思路和实现方法,强调了步进电机、气压限位开关和PLC在系统中的重要作用。关键词如步进电机、气压限位开关和PLC表明了设计的核心技术。
这个基于三菱FX1N-PLC的JXS-A型机械手控制系统设计充分体现了PLC在工业自动化中的应用,通过精心的硬件设计和软件编程,实现了对机械手的高效控制,为实际生产提供了可靠的自动化解决方案。
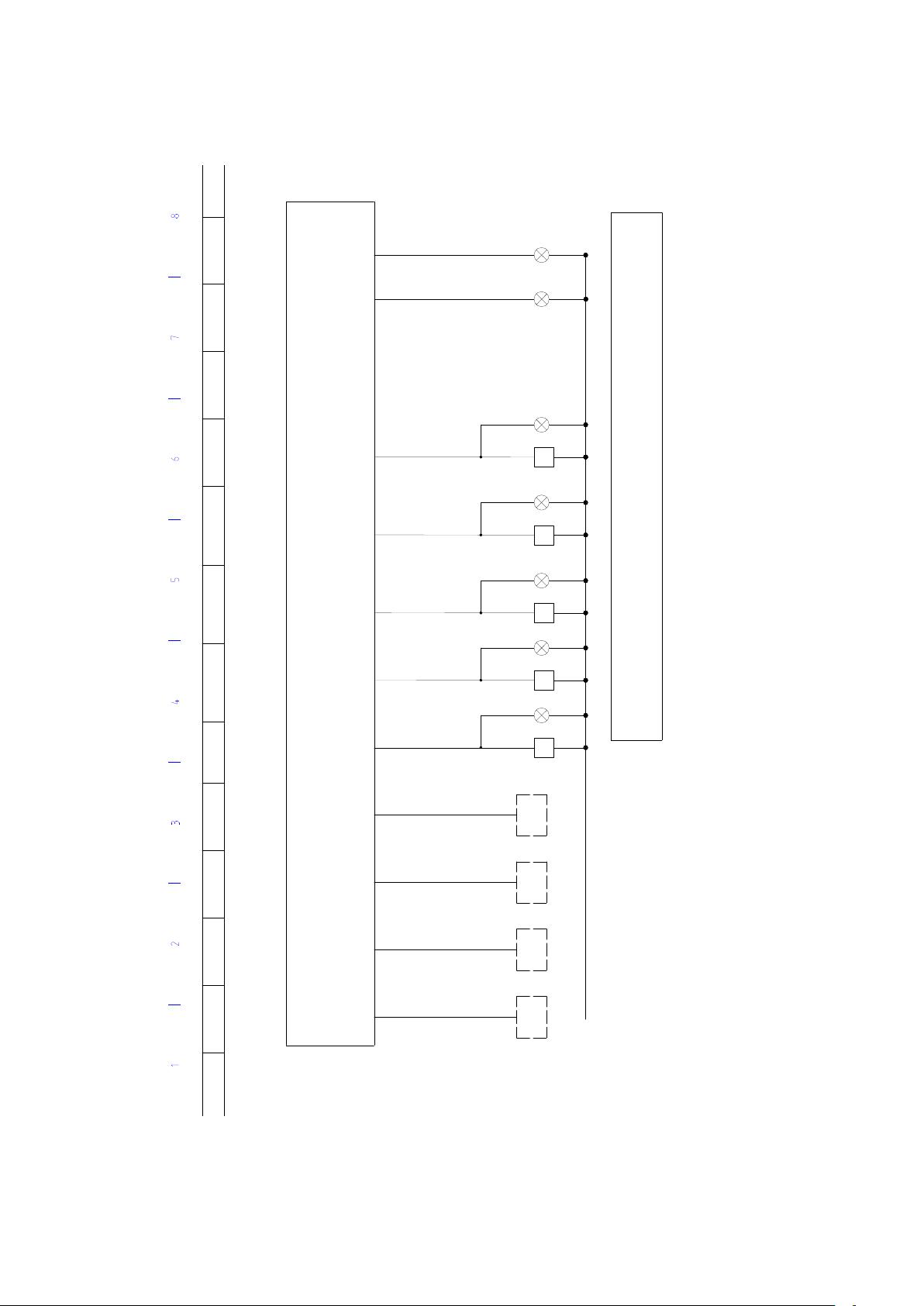
1.3 PLC 输出端接线
KA1
左转
PLC 输出信号
KA2
右转
KA3
爪左转
KA4
爪右转
Y4 Y5
Y6
Y7
Y10
Y11
Y12
Y13
夹紧
报警1
报警2
FX1N-40MT PLC
左转
右转
爪左转
爪右转
夹紧
报警1
报警2
控制面板输出监控区
24V+
Y3
Y2
Y1Y0
CP1
CP2
DIR1
DIR2
方向2方向1脉冲2脉冲1
F1
SH-2024A
SH-2024A SH-2024A
SH-2024A
剩余24页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
2021-05-11 上传
2021-03-13 上传
2021-10-13 上传
2021-08-30 上传
2021-05-01 上传

黑色的迷迭香
- 粉丝: 789
- 资源: 4万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- WordPress作为新闻管理面板的实现指南
- NPC_Generator:使用Ruby打造的游戏角色生成器
- MATLAB实现变邻域搜索算法源码解析
- 探索C++并行编程:使用INTEL TBB的项目实践
- 玫枫跟打器:网页版五笔打字工具,提升macOS打字效率
- 萨尔塔·阿萨尔·希塔斯:SATINDER项目解析
- 掌握变邻域搜索算法:MATLAB代码实践
- saaraansh: 简化法律文档,打破语言障碍的智能应用
- 探索牛角交友盲盒系统:PHP开源交友平台的新选择
- 探索Nullfactory-SSRSExtensions: 强化SQL Server报告服务
- Lotide:一套JavaScript实用工具库的深度解析
- 利用Aurelia 2脚手架搭建新项目的快速指南
- 变邻域搜索算法Matlab实现教程
- 实战指南:构建高效ES+Redis+MySQL架构解决方案
- GitHub Pages入门模板快速启动指南
- NeonClock遗产版:包名更迭与应用更新
