
1 Design and Engineering of Adaptive Software Systems 9
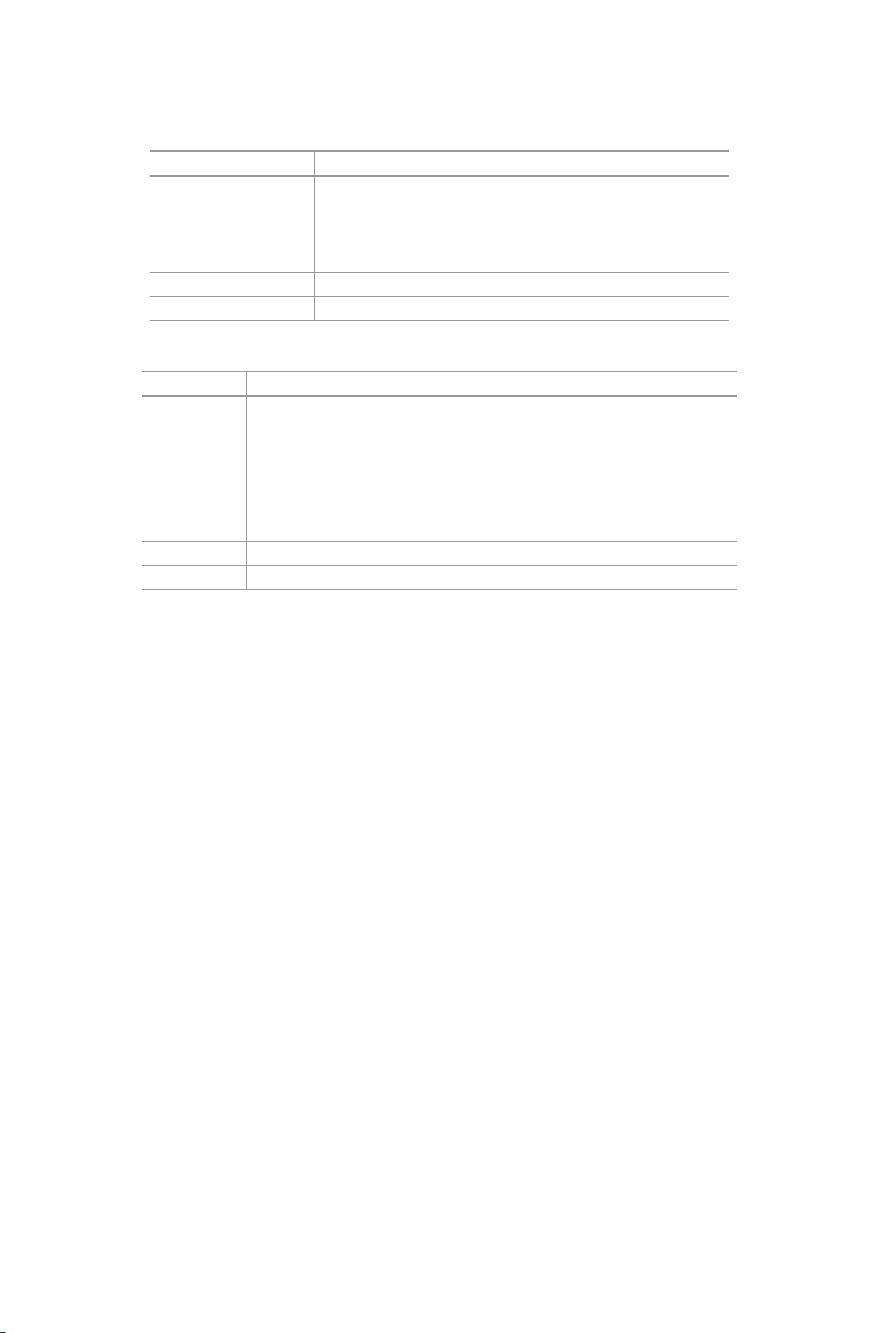
Table 1.2 Revoking action
Action Revoke(s
ij
,s
il
)
Precondition Constraint(s
il
)
∧(bound(s
ij
) ∧ (Function(s
il
) | Function(s
ij
))
∧Quality(s
il
) | Quality(G)
∨¬Available(s
ij
))
Trigger Quality(s
il
) | Quality(s
ij
) ∧ available(s
il
)
Effect bound(s
il
) ∧ remove(s
ij
)
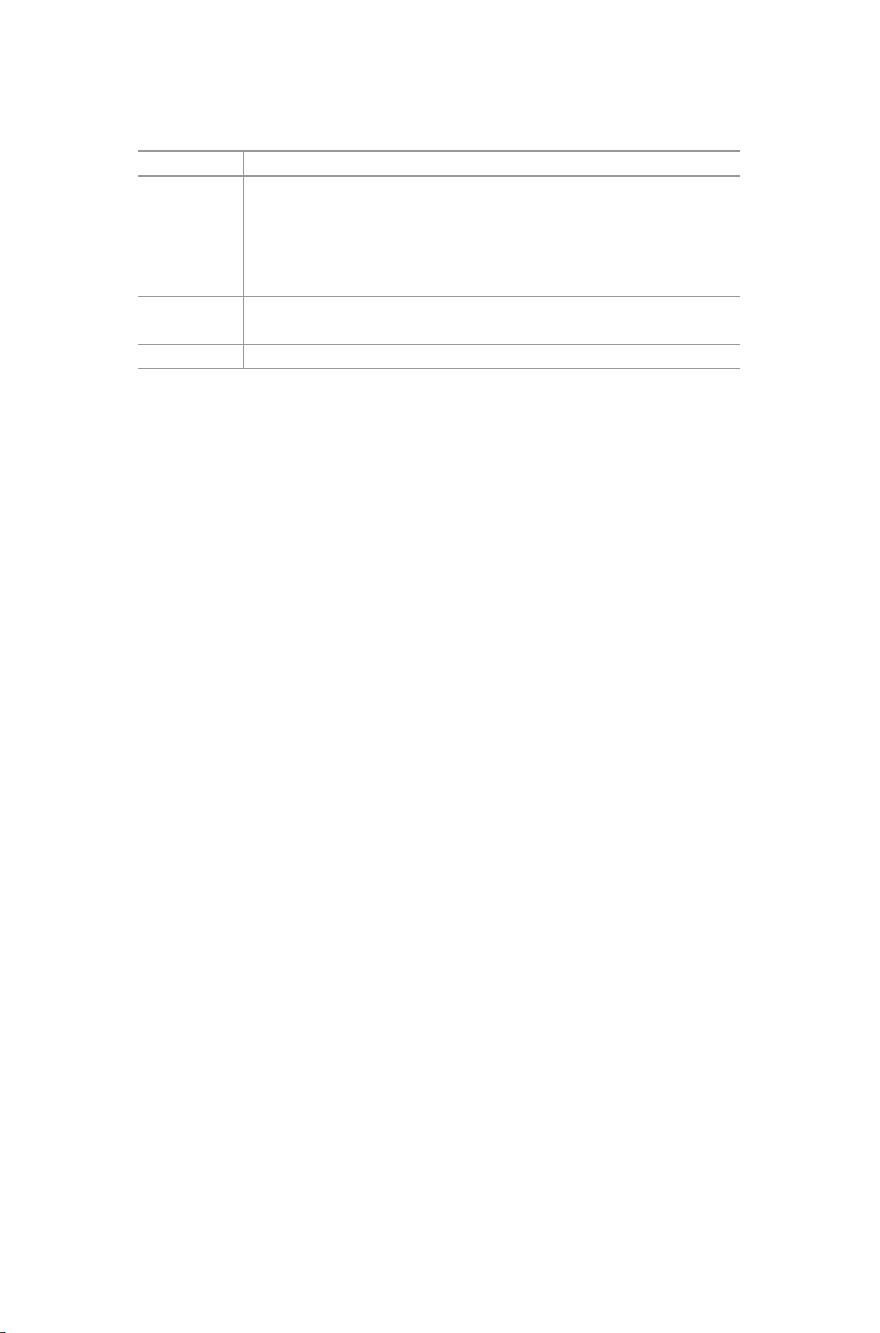
Table 1.3 Par_and(s
i1
,s
ij
,s
il
) Composition action
Action Par_and(s
i1
,s
ij
,s
il
)
Precondition Constraint(s
i1
,s
ij
,s
il
) holds
∧(Function(s
i1
) | Function(s
ij
)) ∧ Function(s
i1
) | Function(s
il
))
∧minimal(throughput(G)) ≥ throughput(s
i1
)
∧minimal(throughput(G)) ≥ throughput(s
ij
)
∧minimal(throughput(G)) ≥ throughput(s
il
)
∧available(s
i1
) ∧ available(s
ij
) ∧ available(s
il
)
Trigger throughput(Par_and(s
i1
,s
ij
,s
il
)) ≥ minimal(throughput(G))
Effect bound(s
i1
) ∧ bound(s
ij
) ∧ bound(s
il
)
“Network speed” has a value that is less than 50 kbps, then the service is not
available.
An adaptive system can perform actions to handle changes of user goals, the
environment, or service components. Each action represents a specific procedure
to be carried out by the system. Adaptation actions include adding, removing, or
updating an atomic service; reorganizing the structure of an abstract service plan;
reorganizing the structure of a concrete service chain and adding, removing, or
updating user goals; and adding, removing, or updating an environmental monitor.
For each action there may be associated environmental conditions that need to
be monitored by the system and included in the environment set E. Actions have
associated preconditions, triggers, and effects with usual semantics. All of them
consist of propositions constraining environmental variables and the internal state
of a service component.
For example, when a new atomic service s
il
emerges, s
ij
is an atomic service of
a composite service that suddenly becomes unavailable or waiting to be executed
at the moment, i.e., Functionality(s
il
) = Functionality(s
ij
), and Quality(s
il
)is
obviously better than Quality (s
ij
); the system may take “revoking” action in
Table 1.2.
When a user’s required value exceeds the QoS value of any existing service
e
1
,...,e
n
, the system may execute more than one atomic service (say s
i1
,s
ij
,s
il
)
concurrently (with complete synchronization) to meet the demand. This is shown as
action “Par _and(s
i1
,s
ij
,s
il
) composition” in Table 1.3.


剩余172页未读,继续阅读

THESUMMERE
- 粉丝: 23
- 资源: 328
 我的内容管理
展开
我的内容管理
展开







最新资源
- C++多态实现机制详解:虚函数与早期绑定
- Java多线程与异常处理详解
- 校园导游系统:无向图实现最短路径探索
- SQL2005彻底删除指南:避免重装失败
- GTD时间管理法:提升效率与组织生活的关键
- Python进制转换全攻略:从10进制到16进制
- 商丘物流业区位优势探究:发展战略与机遇
- C语言实训:简单计算器程序设计
- Oracle SQL命令大全:用户管理、权限操作与查询
- Struts2配置详解与示例
- C#编程规范与最佳实践
- C语言面试常见问题解析
- 超声波测距技术详解:电路与程序设计
- 反激开关电源设计:UC3844与TL431优化稳压
- Cisco路由器配置全攻略
- SQLServer 2005 CTE递归教程:创建员工层级结构
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


