DDC PID控制系统设计与Python仿真
需积分: 9 108 浏览量
更新于2024-07-04
2
收藏 15.53MB DOC 举报
"该资源是一份关于计算机控制技术与系统的研究报告,主要关注DDC(Direct Digital Control)单回路PID闭环控制系统的设汁与实时仿真。报告中使用Python编程语言实现了PID控制器的离散化,并通过MATLAB进行了系统仿真。内容包括离散化PID算式的差分方程,双线性变换法处理二阶惯性加纯迟延对象,以及通过工程整定法调整PID参数。此外,报告还展示了不同控制参数下的系统响应曲线,并涉及DDC系统的手动和自动切换功能的仿真结果。"
这篇报告深入探讨了计算机控制领域中的DDC单回路PID闭环控制系统的设计与仿真。首先,报告提到了理想微分和实际微分PID算式的离散化,这是将连续时间控制算法转换为适合数字处理器的形式,以便于在计算机上实现。离散化后的PID控制器可以通过差分方程来描述,这些方程是基于采样时间进行操作的。
报告进一步展示了理想的和实际的微分PID阶跃响应曲线,这有助于理解控制性能的差异。接下来,报告利用双线性变换法对一个二阶惯性加纯迟延的仿真被控对象进行了离散化处理,这是数字控制中常用的一种方法,能够保留原系统的主要动态特性。
在MATLAB中,通过对仿真对象的阶跃响应曲线分析,可以计算出对象的增益和等效的一阶惯性时间,并与理论计算模型进行对比,确保了模型的准确性和有效性。之后,通过Python编程实现了输入阶跃信号到模拟被控对象,输出控制量u和被控对象输出量y的过程,从而验证了控制系统的功能。
在工程整定法部分,报告使用了稳定边界法来确定PID参数,首先通过纯比例控制找到等幅振荡的Kp值,然后根据此信息调整PID参数,以实现良好的控制性能。报告展示了在不同阶跃输入下,系统的输出响应,包括正向和反向阶跃,以及在DDC控制系统的手自动切换情况下的系统行为。
最后,报告给出了Python代码示例,用于生成理想微分和实际微分PID控制器的阶跃响应曲线,这展示了如何在实际编程环境中实现这些控制算法。
这份报告为读者提供了一个全面的理解DDC单回路PID闭环控制系统设计和仿真的实践指导,包括理论分析、数值计算、软件实现和系统性能评估等多个方面,对于学习和研究控制理论以及实际系统设计具有很高的参考价值。
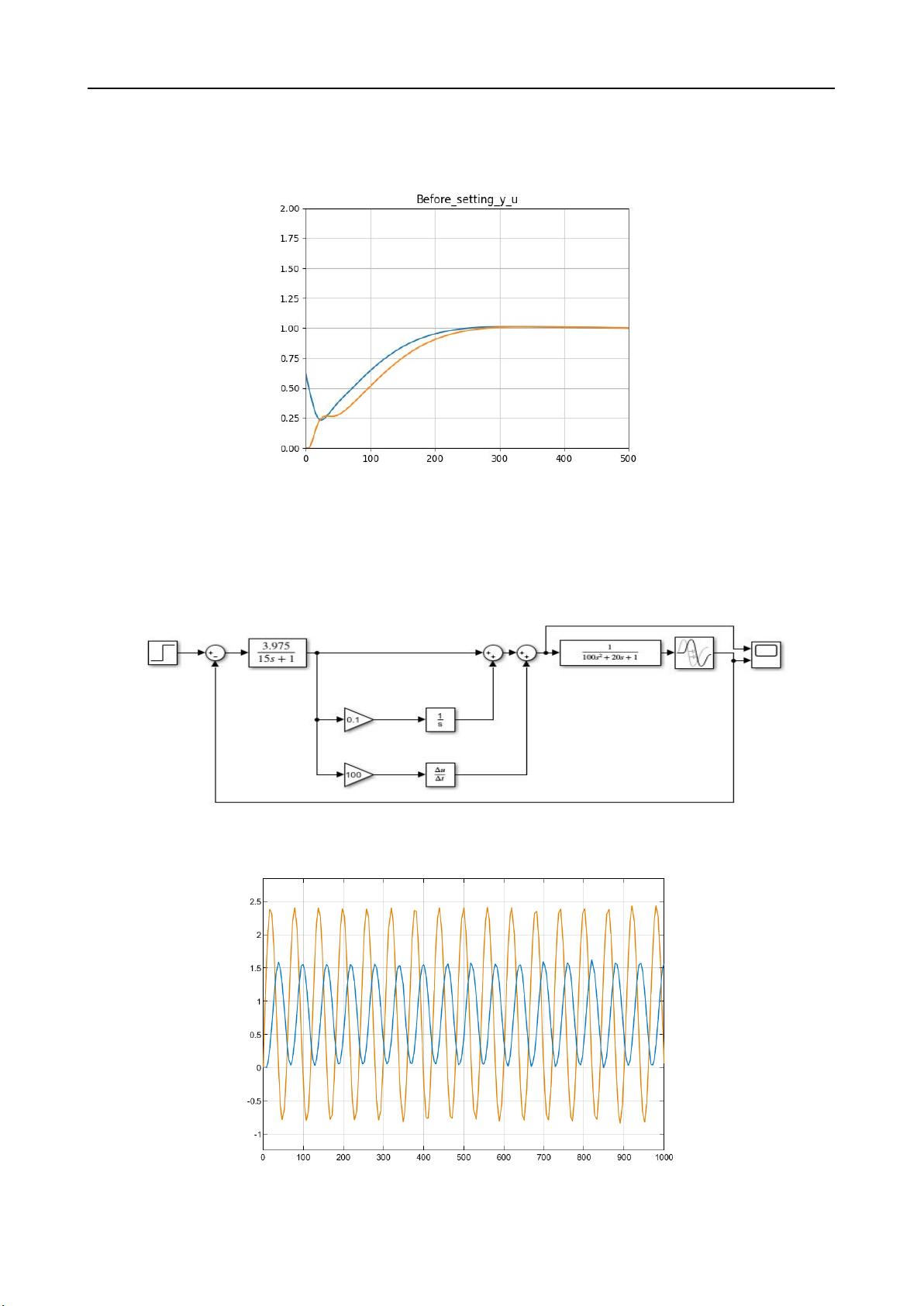
10、输入幅值为 1 的阶跃信号到模拟被控对象,输出控制量 u 和被控对象输出量 y:
此时 kp=0.1,Ti=0.01,Td=10,Tf=15
11.用工程整定法整定 PID 控制参数
用稳定边界法整定(simulink 实现):
① 采用纯比例控制,当 Kp=3.975 时,被调量输出为等幅振荡,如下图:
5
剩余27页未读,继续阅读
2022-05-06 上传
277 浏览量
2023-10-18 上传
2023-07-17 上传
2023-02-17 上传
2023-08-29 上传
2023-10-16 上传
2023-09-09 上传
2023-04-28 上传

m0_56335826
- 粉丝: 2
- 资源: 4
 我的内容管理
展开
我的内容管理
展开







最新资源
- 天池大数据比赛:伪造人脸图像检测技术
- ADS1118数据手册中英文版合集
- Laravel 4/5包增强Eloquent模型本地化功能
- UCOSII 2.91版成功移植至STM8L平台
- 蓝色细线风格的PPT鱼骨图设计
- 基于Python的抖音舆情数据可视化分析系统
- C语言双人版游戏设计:别踩白块儿
- 创新色彩搭配的PPT鱼骨图设计展示
- SPICE公共代码库:综合资源管理
- 大气蓝灰配色PPT鱼骨图设计技巧
- 绿色风格四原因分析PPT鱼骨图设计
- 恺撒密码:古老而经典的替换加密技术解析
- C语言超市管理系统课程设计详细解析
- 深入分析:黑色因素的PPT鱼骨图应用
- 创新彩色圆点PPT鱼骨图制作与分析
- C语言课程设计:吃逗游戏源码分享
