开源自驾仪APM_V2.8.0:打造你的无人机系统
需积分: 42 192 浏览量
更新于2024-07-22
1
收藏 3.18MB PDF 举报
"APM_V2.8.0自驾仪入门手册"
ArduPilotMega(简称APM自驾仪)是一款强大的开源自动驾驶控制器,适用于多种类型的无人飞行器和地面车辆。这款自驾仪的核心特性在于其灵活性和易用性,不仅支持固定翼、直升机、多旋翼飞行器,还兼容地面车辆。用户可以通过配套的地面控制站进行固件升级和参数调整,建立无线数据链路,实现远程控制和监控。
APM自驾仪的主要特点包括:
1. 开源软件:APM自驾仪的程序是免费开源的,允许用户根据需要自定义和改进。它提供了多个模式,如ArduPlane(固定翼飞机)、ArduCopter(直升机和多旋翼)和ArduRover(地面车辆)。
2. 地面站支持:与之配合的地面站软件提供图形化界面,用户无需编程知识即可进行设置和程序更新。此外,支持通过Micro USB或无线数据传输连接。
3. MAVLink协议:APM自驾仪基于MAVLink协议,实现双向遥测和实时通信,确保高效的数据传输和命令执行。
4. 任务规划:地面站的规划器支持创建复杂的三维航点任务,用户只需简单地在地图上点击操作。
5. 多样化地面站选项:如MissionPlanner和HKGCS等,以及手机应用,提供任务规划、参数调整、视频显示、语音合成等功能。
6. 自动化功能:具备自动起飞、降落、航点飞行和自动返航等自驾仪关键性能。
7. 仿真支持:完全支持Xplane和FlightGear等半硬件仿真,方便用户在真实飞行前进行测试和调试。
在硬件方面,APM自驾仪配置了高性能的组件:
- 使用ATMEGA2560作为主控微控制器,提供足够的处理能力。
- 集成了MPU6000六轴MEMS传感器,包含三轴陀螺仪和三轴加速度计,用于稳定和导航。
- MS-5611数字空气压力传感器用于高度测量,提供精确的高度信息。
- 内置16MB的AT45DB161D存储器,存储飞行数据和参数设置。
- 包括三轴磁力计HMC5883,用于确定飞行器的方向。
- 提供8路PWM控制输入、11路模拟传感器输入和11路PWM输出(8路电机控制+3路云台稳定)。
- 支持不同类型的GPS模块,如MTK3329和ublox系列,以适应不同的定位需求。
- 可扩展性良好,允许屏蔽板载功能,如PPM解码和罗盘,使用外部设备进行扩展。
总而言之,APM自驾仪是一个功能强大且灵活的自动驾驶控制器,适合个人和专业人士构建无人机系统。其开源性质、丰富的软件支持和强大的硬件配置,使其成为无人飞行和地面机器人领域的理想选择。
风迅电子 http://shop109208831.taobao.com
八、地面站调试软件 Mission Planner 安装
首先,Mission Planner的安装运行需要微软的Net Framework 4.0 组件,所以在安装Mission Planner之前
请先下载Net Flamework 4.0 并安装,官方下载地址为
http://www.microsoft.com/zh-cn/download/confirmation.aspx?id=17718
安装完Net Framework后开始下载Mission Planner安装程序包,最新版本的Mission Planner可以点击此处
下载:
http://firmware.diydrones.com/Tools/MissionPlanner/,下载页面中每个版本都提供了MSI版和ZIP版可
供选择。MSI为应用程序安装包版,安装过程中会同时安装APM的USB驱动,安装后插上APM的USB线即可使用。ZIP
版为绿色免安装版,解压缩即可使用,但是连接APM后需要你手动安装APM的USB驱动程序,驱动程序在解压后的
Driver文件夹中。具体使用哪个版本请自行决定,如果是第一次安装使用,建议你下载MSI版。
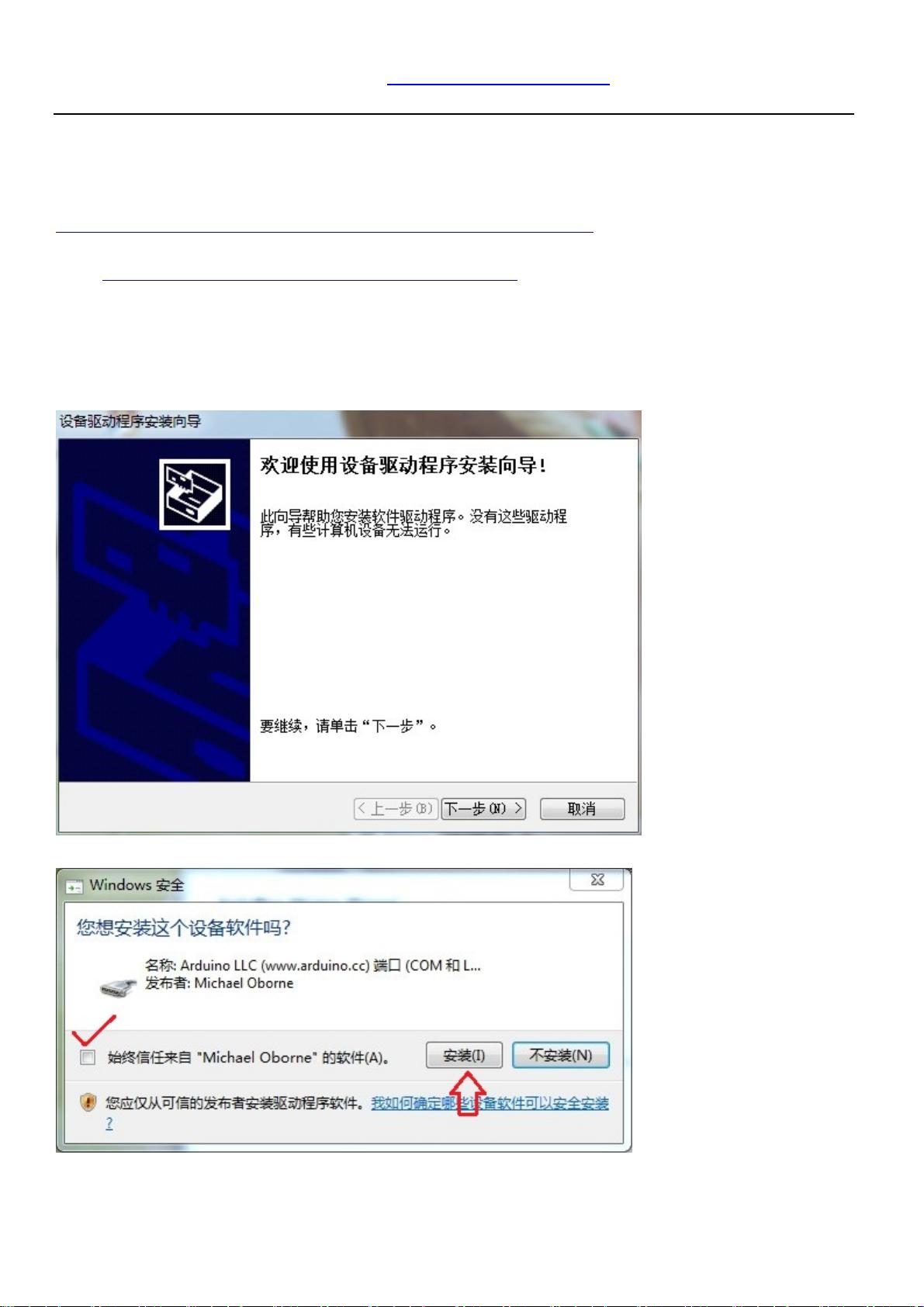
以安装 MSI 版为例(注意:安装前请不要连接 APM 的 USB 线),双击下载后的 MSI 文件,然后一步一步 Next
即可,只是安装过程中弹出设备驱动程序安装向导时,请点击下一步继续,否则会跳过驱动程序的安装
接着勾选始终信任……然后点击安装,安装程序会自动安装相关的驱动程序

剩余30页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2015-09-22 上传
2023-04-03 上传
2023-04-03 上传
176 浏览量
621 浏览量
2021-08-04 上传

qq_24569043
- 粉丝: 1
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- 蒙特卡罗方法及应用(论文)
- Android开发指南中文版.doc
- 《计算机原理与接口技术》清华版本
- Apress.Pro Android.2009
- ActionSciipt3.0
- How+We+Test+Software+at+Microsoft.pdf
- ARCGIS二次开发
- ActionScript3 Cookbook
- spring_ioc_minibook_by_infoq
- The C++ Programming Language
- ArcGIS+API+for+Flex+教程
- s7200_system_manual_zh-CHS
- 在 Windows Vista 中使用 Microsoft 系统配置实用程序
- 在 Windows Vista 中执行 HP 系统恢复(Flash 动画演示)
- 一种自己做的BP算法
- ArcGIS+Engine开发实例教程-肖泽云
