近交方向法求解半确定秩最小化问题
122 浏览量
更新于2024-07-15
收藏 1.86MB PDF 举报
"这篇研究论文探讨了一种名为‘半确定秩最小化近交方向法’的优化技术,用于解决在信号处理和机器学习领域广泛应用的半确定秩最小化问题。半确定秩最小化问题通常被认为是NP难的问题。作者Ganzhao Yuan和Bernard Ghanem提出了一个近交交替方向方法(Proximal Alternating Direction Method, 简称ADM)来处理这类具有挑战性的优化问题。"
正文:
半确定秩最小化问题在信号处理和机器学习中扮演着重要角色,它涉及到寻找矩阵秩最小的解,然而,由于其复杂性,此类问题通常被认为是NP难的。针对这一难题,该论文提出了一种新的解决方案:近交交替方向法。这种方法将原问题重新表述为一个等价的双凸MPEC(数学规划与平衡约束问题),然后再利用近交ADM来求解。
近交ADM是一种有效的优化算法,它通过解决一系列结构化的凸半确定子问题逐步逼近原始秩正则化优化问题的解。该方法的优势在于它能够处理非凸优化问题,并且在适当条件下确保收敛到原问题的KKT(Karush-Kuhn-Tucker)稳定点。KKT条件是解决非线性优化问题的一种关键工具,它定义了最优解必须满足的一组必要条件。
论文中,作者基于Kurdyka-Łojasiewicz不等式证明了所提出的近交ADM算法在温和条件下始终能收敛到KKT稳定点。Kurdyka-Łojasiewicz不等式是分析非光滑优化算法收敛性的重要理论工具,它为理解和证明算法的全局收敛性提供了有力的支持。
为了进一步验证该方法的有效性,作者将其应用到广泛研究和流行的传感器网络问题上。传感器网络通常涉及大量的数据收集和处理,其中半确定秩最小化可以用于降维、信号恢复和网络同步等问题。通过实际应用,论文展示了所提方法在解决这类实际问题时的可行性和效率。
这篇研究论文为解决半确定秩最小化问题提供了一个新的算法途径,不仅理论上保证了收敛性,而且在实际应用中展示了良好的性能。这为今后处理类似复杂优化问题的研究提供了有价值的参考和工具。
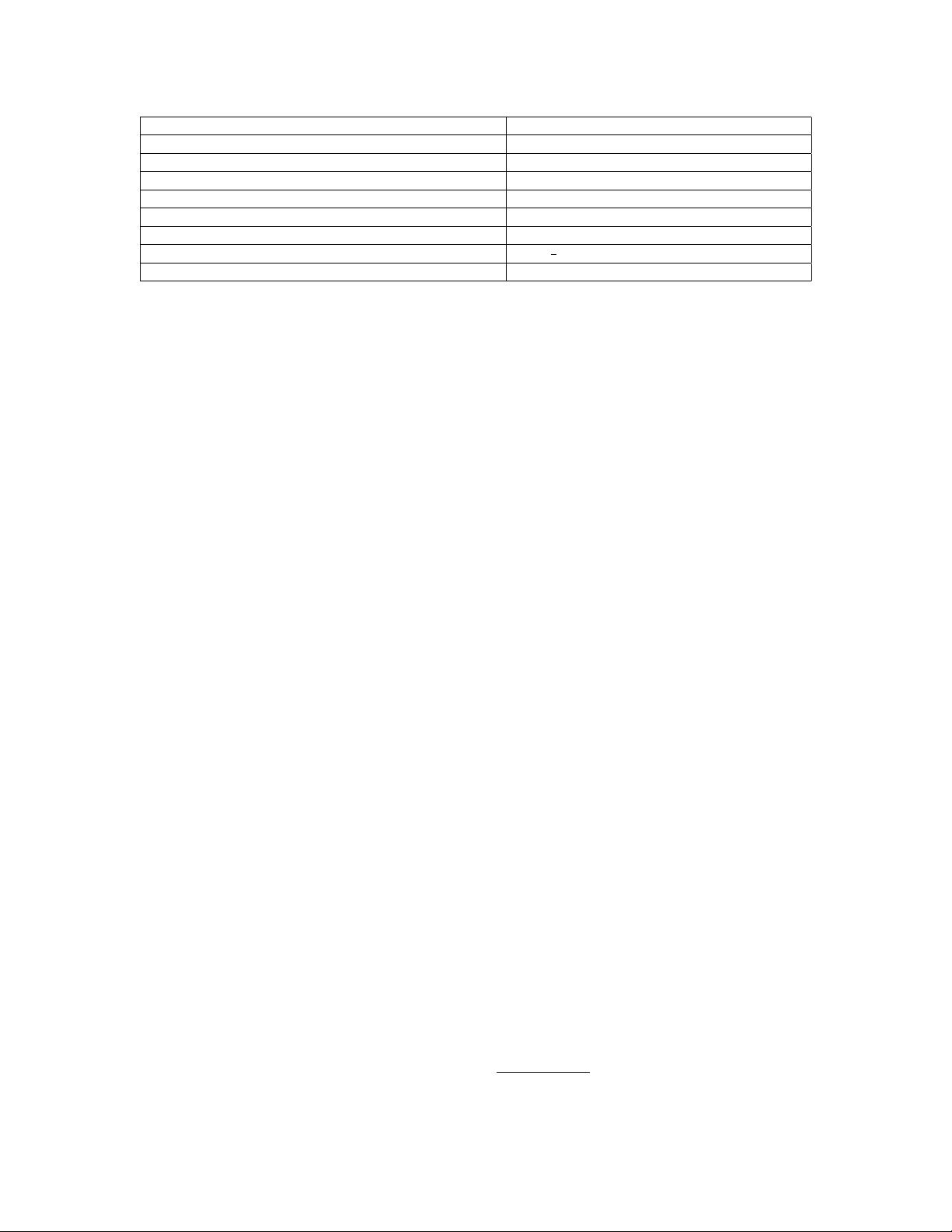
Table 1: Semi-definite rank minimization algorithms.
Optimization Algorithms and References Description
(a) convex trace norm (Fazel 2002; Cand
`
es and Tao 2010) rank(X) ≈ tr(X)
(b) nonlinear factorization (Burer and Monteiro 2003) rank(X) ≤ k, with X ≈ LL
T
, L ∈ R
n×k
(c) Schatten `
p
norm (Lu 2014; Nie, Huang, and Ding 2012) rank(X) ≈ kσ(X)k
p
(d) log-det heuristic (Fazel, Hindi, and Boyd 2003; Deng et al. 2013) rank(X) ≈ log det(X + I)
(e) truncated nuclear norm (Hu et al. 2013; Miao, Pan, and Sun 2015) rank(X) ≤ k ⇔ tr(X) = kσ(X)k
top-k
(f) pseudo-inverse reformulation(Zhao 2012) rank(A) = rank(A
†
A) = tr(A
†
A)
(g) iterative hard thresholding (Zhang and Lu 2011; Lu and Zhang 2013) min
X
1
2
kX − X
0
k
2
F
+ rank(X)
(h) MPEC reformulation [this paper],(Yuan and Ghanem 2015) rank(X)= min
0VI
tr(I − V), s.t. hV, Xi = 0
the high dimensional solution to the desirable space us-
ing eigenvalue decomposition, but this generally only pro-
duces sub-optimal results. Second-order cone programming
relaxation was proposed in (Tseng 2007), which has su-
perior polynomial complexity. However, this technique ob-
tains good results only when the anchor nodes are placed
on the outer boundary, since the positions of the estimat-
ed remaining nodes lie within the convex hull of the an-
chor nodes. Due to the high computational complexity of
the standard SDP algorithm, the work of (Wang et al. 2008;
Pong and Tseng 2011) considers further relaxations of the
semi-definite programming approach to address the sensor
network localization problem. Very recently, the work of (Ji
et al. 2013) explores the use of a nonconvex surrogate of
the rank function, namely the Schatten `
p
-norm, in network
localization. Although the resulting optimization is noncon-
vex, they show that a first-order critical point can be approx-
imated in polynomial time by an interior-point algorithm.
Several semi-definite rank minimization algorithms have
been studied in the literature (See Table 1). (a) Convex trace
norm (Fazel 2002) is a lower bound of the rank function in
the sense of operator (or spectral) norm. It is proven to lead
to a near optimal low-rank solution (Cand
`
es and Tao 2010;
Recht, Fazel, and Parrilo 2010) under certain incoherence
assumptions. However, such assumptions may be violated
in real applications. (b) Nonlinear factorization (Burer and
Monteiro 2003; 2005) replaces the solution matrix X by a
nonlinear matrix multiplication LL
T
. One important fea-
ture of this approach is avoiding the need to perform eigen-
value decomposition. (c) Schatten `
p
norm with p ∈ (0, 1)
was considered by (Lu 2014; Nie, Huang, and Ding 2012;
Lu et al. 2014) to approximate the discrete rank function.
It results in a local gradient Lipschitz continuous function,
to which some smooth optimization algorithms can be ap-
plied. (d) Log-det heuristic (Fazel, Hindi, and Boyd 2003;
Deng et al. 2013) minimizes the first-order Taylor series ex-
pansion of the objective function iteratively to find a local
minimum. Since its first iteration is equivalent to solving the
trace convex relaxation problem, it can be viewed as a re-
finement of the trace norm. (e) Truncated trace norm (Hu et
al. 2013; Miao, Pan, and Sun 2015; Law, Thome, and Cord
2014) minimizes the summation of the smallest (n − k)
eigenvalues, where k is the matrix rank. This is due to the
fact that these eigenvalues have little effect on the approxi-
mation of the matrix rank. (f) Pseudo-inverse reformulations
(Zhao 2012) consider an equivalent formulation to the rank
function: rank(A) = tr(A
†
A). However, similar to matrix
rank, the pseudo-inverse function is not continuous. Fortu-
nately, one can use a Tikhonov regularization technique
1
to approximate the pseudo-inverse. Inspired by this fact, the
work of (Zhao 2012) proves that rank minimization can be
approximated to any level of accuracy via continuous op-
timization. (g) Iterative hard thresholding (Zhang and Lu
2011) considers directly and iteratively setting the largest (in
magnitude) elements to zero in a gradient descent format. It
has been incorporated into the Penalty Decomposition Al-
gorithm (PDA) framework (Lu and Zhang 2013). Although
PDA is guaranteed to converge to a local minimum, it lacks
stability. The value of the penalty function can be very large,
and the solution can be degenerate when the minimization
subproblem is not exactly solved.
From above, we observe that existing methods either pro-
duce approximate solutions (method (a), (c), (d) and (g)), or
limited to solving feasibility problems (method (b) and (e)).
The only existing exact method (method (g)) is the penalty
method. However, it often gives much worse results even as
compared with the simple convex methods, as shown in our
experiments. This unappealing feature motivates us to de-
sign a new exact multiplier method in this paper. Recently,
the work of (Li and Qi 2011) considers a continuous varia-
tional reformulation of the low-rank problem to solve sym-
metric semi-definite optimization problems subject to a rank
constraint. They design an ADM algorithm that finds a sta-
tionary point of the rank-constrained optimization problem.
Inspired by this work, we consider a augmented Lagrangian
method to solve the general semi-definite rank minimiza-
tion problem by handling its equivalent MPEC reformula-
tion. Note that the formulation in (Li and Qi 2011) can be
viewed as a special case of ours, since it assumes that the
solution has unit diagonal entries, i.e. diag(X) = 1.
3 Proposed Optimization Algorithm
This section presents our proposed optimization algorithm.
Specifically, we first reformulate the optimization problem
in Eq (1) as an equivalent MPEC (Mathematical Program
with Equilibrium Constraints) in Section 3.1, and then solve
the equality constrained optimization problem by a proxi-
mal Alternating Direction Method (ADM) in Section 3.2. In
Subsection 3.3, we discuss the merits of the MPEC reformu-
lation and the proximal ADM algorithm.
1
A
†
= lim
→0
(A
T
A + I)
−1
A
T
= lim
→0
A
T
(AA
T
+ I)
−1
剩余14页未读,继续阅读
2020-06-01 上传
2024-10-11 上传
2024-10-14 上传
2024-10-14 上传
2024-10-15 上传
2024-10-14 上传

weixin_38621082
- 粉丝: 9
- 资源: 948
 我的内容管理
展开
我的内容管理
展开







最新资源
- 前端面试必问:真实项目经验大揭秘
- 永磁同步电机二阶自抗扰神经网络控制技术与实践
- 基于HAL库的LoRa通讯与SHT30温湿度测量项目
- avaWeb-mast推荐系统开发实战指南
- 慧鱼SolidWorks零件模型库:设计与创新的强大工具
- MATLAB实现稀疏傅里叶变换(SFFT)代码及测试
- ChatGPT联网模式亮相,体验智能压缩技术.zip
- 掌握进程保护的HOOK API技术
- 基于.Net的日用品网站开发:设计、实现与分析
- MyBatis-Spring 1.3.2版本下载指南
- 开源全能媒体播放器:小戴媒体播放器2 5.1-3
- 华为eNSP参考文档:DHCP与VRP操作指南
- SpringMyBatis实现疫苗接种预约系统
- VHDL实现倒车雷达系统源码免费提供
- 掌握软件测评师考试要点:历年真题解析
- 轻松下载微信视频号内容的新工具介绍
