
基于双积分滑模控制的基于双积分滑模控制的Buck-Boost电压平衡器的研究电压平衡器的研究
基于Buck-Boost电压平衡器构架的双极性直流微电网获得了广泛研究。其中有效地控制电压平衡器使系统正、
负极电压保持相等,从而保证系统的供电电能质量。针对Buck-Boost电压平衡器的控制,设计一种双积分滑模
控制器。该方法考虑了系统的非线性和工作动态,并采用双积分滑模面以减小稳态误差。实验结果表明,相比
传统的PI控制器,本文设计的控制器能有效缩短动态调节时间和减小正、负极电压差值。
0 引言引言
随着传统能源的枯竭和新能源技术的发展,直流微电网获得了广泛的研究
[1]
,特别是双极性直流微电网由于其容量大、多电
压等级等优点,已逐步应用于工业中
[2]
。双极性直流微电网运行时,应使系统正、负极输出的电压相等以保证系统供电电能质
量。基于电压平衡器构架的双极性直流微电网是双极性直流微电网常见的一种形式,其设计相对灵活,运行可靠性较高,扩展
性较强
[3-4]
。
现有的文献中,已经提出多种电压平衡器的结构,本文研究常规的Buck-Boost电压平衡器的控制。Buck-Boost电压平衡器
大多采用PI控制器
[5-6]
,虽然PI控制器在一定范围内能获得良好的动态响应和稳态效果,但是大范围工作状态下很难取得良好
效果
[7-9]
。滑模控制是一种非线性控制,具有全局稳定、鲁棒性强、容易实现等优点。近年来,有学者将滑模控制引入到电力
电子系统的控制中,并取得优越的效果
[8-9]
。本文设计一种双积分滑模(Double Integral Sliding Mode,DISM)控制器运用在
Buck-Boost电压平衡器的控制中。
本文首先研究Buck-Boost电压平衡器的状态方程,然后针对PI控制器存在的问题设计一种双积分滑模控制器,最后实验结
果表明本文设计的控制方法优于PI控制。
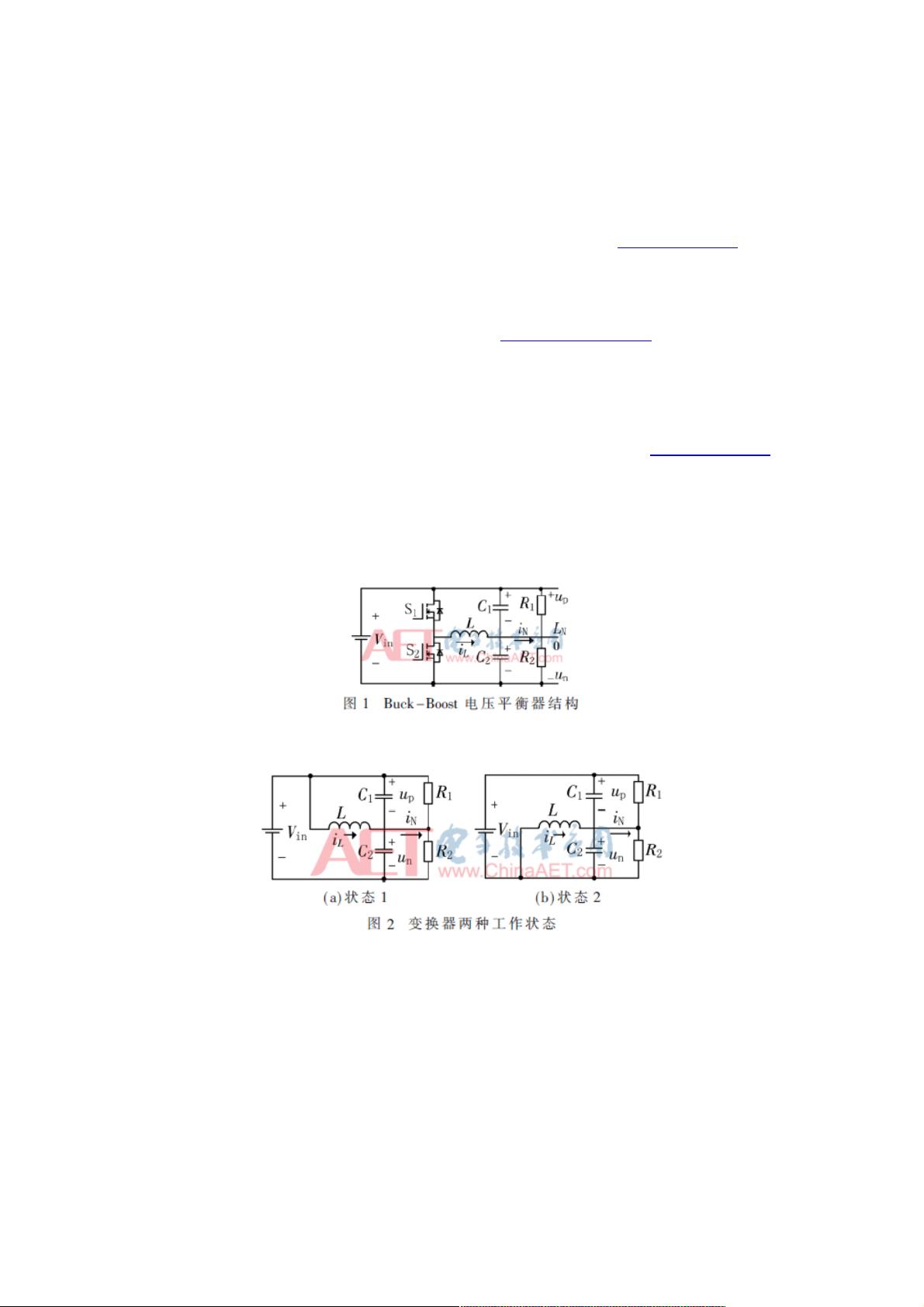
1 Buck-Boost电压平衡器结构电压平衡器结构
Buck-Boost电压平衡器结构如图1所示。其中V
in
为输入电压;L为电感,流过的电流为i
L
;S
1
、S
2
为开关管;C
1
、C
2
为电
容,设两个电容的电容值相等为C;R
1
、R
2
代表正、负极负荷;u
p
、u
n
分别为正、负极电压;L
N
表示中线,i
N
为中线电流。
为了使硬件驱动开关管方便,两个开关管互补导通。其工作状态有两种,如图2所示。
状态1,S
1
导通,S
2
关断,状态方程为:
下载后可阅读完整内容,剩余5页未读,立即下载

weixin_38642636
- 粉丝: 12
- 资源: 931
 我的内容管理
展开
我的内容管理
展开







最新资源
- C++标准程序库:权威指南
- Java解惑:奇数判断误区与改进方法
- C++编程必读:20种设计模式详解与实战
- LM3S8962微控制器数据手册
- 51单片机C语言实战教程:从入门到精通
- Spring3.0权威指南:JavaEE6实战
- Win32多线程程序设计详解
- Lucene2.9.1开发全攻略:从环境配置到索引创建
- 内存虚拟硬盘技术:提升电脑速度的秘密武器
- Java操作数据库:保存与显示图片到数据库及页面
- ISO14001:2004环境管理体系要求详解
- ShopExV4.8二次开发详解
- 企业形象与产品推广一站式网站建设技术方案揭秘
- Shopex二次开发:触发器与控制器重定向技术详解
- FPGA开发实战指南:创新设计与进阶技巧
- ShopExV4.8二次开发入门:解决升级问题与功能扩展
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


