嵌入式汽车平台中的LATTE-LSTM异常检测框架
版权申诉
200 浏览量
更新于2024-07-06
收藏 2.62MB PDF 举报
"嵌入式汽车平台中基于LATTE-LSTM自注意的异常检测方法,旨在在复杂的车载网络系统中,利用深度学习技术检测并预防潜在的网络安全威胁。"
随着现代汽车技术的发展,车辆可以被视为复杂的分布式嵌入式系统,它们运行着各种实时性的车载应用。这种趋势使得汽车越来越具有自主性,同时也与外部系统(如路边信标、其他车辆)紧密相连,增加了遭受网络攻击的风险。由于汽车应用和车内网络的复杂性,攻击的可见性较差,这给汽车系统的安全防护带来了巨大挑战。
本文提出的创新框架——LATTE(LSTM Self-Attention based Anomaly Detection),专门针对基于Controller Area Network (CAN)的车载网络进行异常检测,以识别并防御潜在的网络攻击。该框架采用了一种堆叠的长短期记忆(LSTM)预测网络,并引入了新颖的注意力机制,即自注意力(Self-Attention)。LSTM作为一种递归神经网络(RNN)的变体,能够有效地处理时间序列数据,捕捉长期依赖关系,适合分析连续的CAN总线数据流。
自注意力机制是深度学习中的一个关键组件,尤其在自然语言处理领域,它允许模型在不同位置之间建立联系,重视关键信息而忽略不相关的细节。在LATTE框架中,自注意力增强了LSTM网络的理解能力,使其能够关注到数据流中的关键特征,提高对异常行为的识别精度。
在车载网络中,CAN总线是通信的核心,负责在车辆的不同模块间传输数据。由于其开放性和未加密的特性,CAN总线成为了潜在的攻击入口。LATTE通过训练LSTM网络学习正常CAN数据包的模式,一旦检测到与这些模式显著偏离的流量,就可能标识为异常,从而触发警报或执行相应的防御措施。
LATTE框架利用深度学习的LSTM和自注意力机制,提高了在嵌入式汽车平台中检测网络攻击的能力。这种方法不仅有助于增强汽车的安全性,还为其他类似实时系统的安全防护提供了新的思路和工具。未来的研究可能会进一步优化这一框架,例如,结合其他深度学习模型,如Transformer或GRU,以及强化在线学习和适应性,以应对不断演变的网络攻击策略。
5
detect various attacks in the in-vehicle network. The use of static threshold values for detection limits the
scheme to detecting only very simple attacks. In [33], the authors propose a deep convolutional neural network
(CNN) model to detect anomalies in the vehicle’s CAN network. However, the model does not consider the
temporal relationships between messages, which can better predict certain attacks. The authors in [34]
proposed an LSTM framework with a hierarchical attention mechanism to reconstruct the input messages. A
non-parametric kernel density estimator along with a k-nearest neighbors classifier is used to reconstruct the
messages and the reconstruction error is used to detect anomalies. Although most of these techniques attempt
to increase the detection accuracy and attack coverage, none of them offers the ability to process very long
sequences with relatively low memory and runtime overhead and still achieve reasonably high performance.
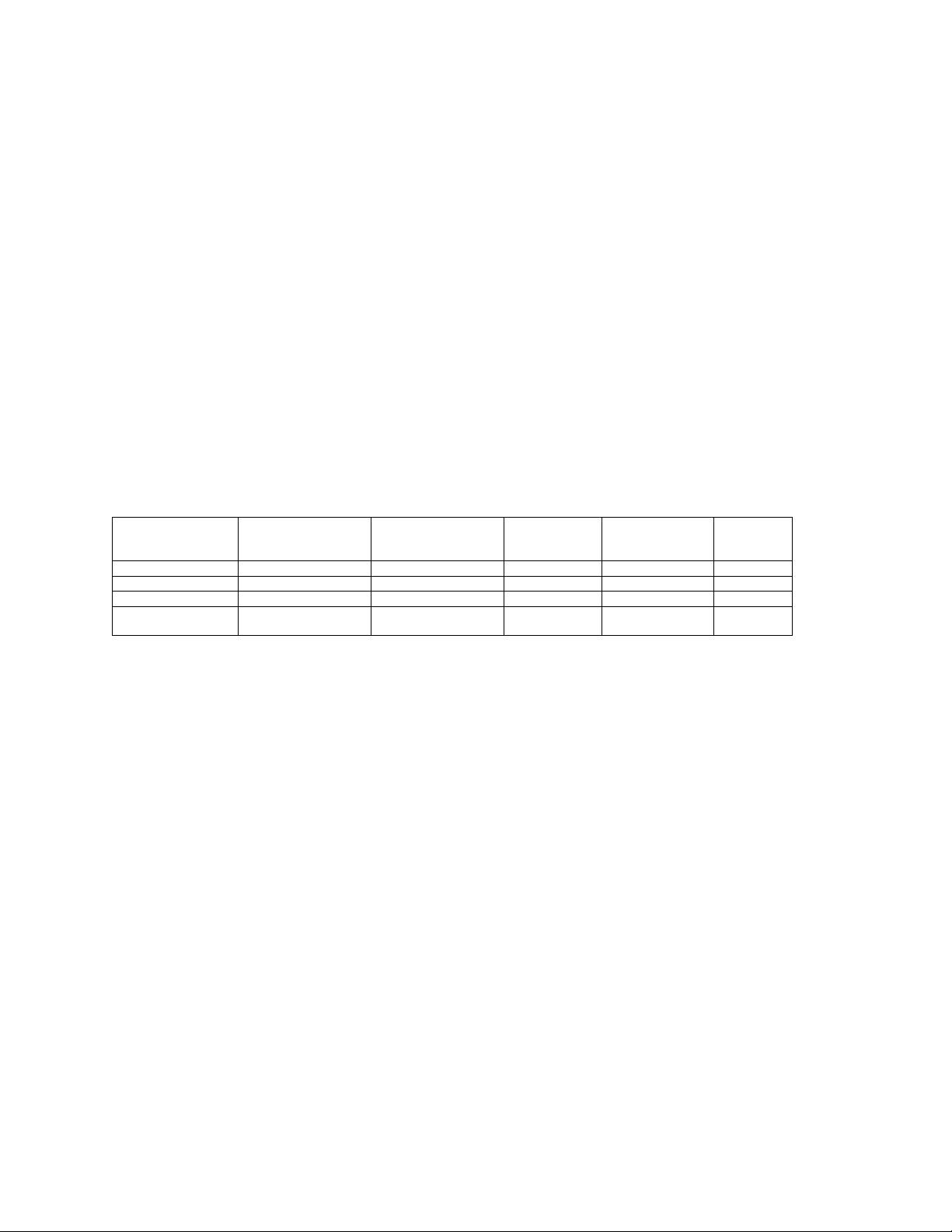
In this paper, we propose a robust deep learning model that integrates a stacked LSTM based encoder-
decoder model with a self-attention mechanism, to learn normal system behavior by learning to predict the next
message instance. Table I summarizes some of the state-of-the-art anomaly detection works and their key
features, and highlights the unique characteristics of our proposed LATTE framework. At runtime, we
continuously monitor in-vehicle network messages and provide a reliable detection mechanism using a non-
linear classifier. Sections 4 and 5 provide a detailed explanation of the proposed model and overall framework.
In section 6 we show how our model is capable of efficiently identifying a variety of attack scenarios.
Table 1: Comparison between our proposed LATTE framework and the state-of-the-art works
Technique Task
Network
architecture
Attention
type
Detection
technique
Requires
labeled
data?
BWMP [30] Bit level prediction LSTM network - Static threshold Yes
RepNet [28] Input recreation Replicator network - Static threshold No
HAbAD [34] Input recreation Autoencoder Hierarchical KDE and KNN Yes
LATTE
Next message value
prediction
Encoder-decoder Self-attention OCSVM No
3 BACKGROUND
Solving complex problems using deep learning was made possible due to advances in computing hardware
and the availability of high-quality datasets. Anomaly detection is one such problem that can leverage the power
of deep learning. In an automotive system, ECUs exchange safety-critical messages periodically over the in-
vehicle network. This time series exchange of data results in temporal relationships between messages, which
can be exploited to detect anomalies. However, this requires a special type of neural network, called Recurrent
Neural Network (RNN) to capture the temporal dependencies between messages. Unlike traditional feed-
forward neural networks where the output is independent of any previous inputs, RNNs use previous sequence
state information in computing the output, which makes them an ideal choice to handle time-series data.
3.1 Recurrent Neural Network (RNN)
An RNN [35] is the most basic sequence model that takes sequential data such as time-series data as the input
and learns the underlying temporal relationships between data samples. An RNN block consists of an input, an
output, and a hidden state that allows it to remember the learned temporal information. The input, output, and
hidden state all correspond to a particular time step in the sequence. The hidden-state information can be
thought of as a data point in the latent space that contains important temporal information about the inputs from
剩余23页未读,继续阅读
2021-04-12 上传
2021-01-31 上传
2019-08-27 上传
2023-04-04 上传
2023-06-07 上传
2023-07-27 上传
2024-11-05 上传
2023-11-23 上传
2023-07-27 上传


易小侠
- 粉丝: 6625
- 资源: 9万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- Java毕业设计项目:校园二手交易网站开发指南
- Blaseball Plus插件开发与构建教程
- Deno Express:模仿Node.js Express的Deno Web服务器解决方案
- coc-snippets: 强化coc.nvim代码片段体验
- Java面向对象编程语言特性解析与学生信息管理系统开发
- 掌握Java实现硬盘链接技术:LinkDisks深度解析
- 基于Springboot和Vue的Java网盘系统开发
- jMonkeyEngine3 SDK:Netbeans集成的3D应用开发利器
- Python家庭作业指南与实践技巧
- Java企业级Web项目实践指南
- Eureka注册中心与Go客户端使用指南
- TsinghuaNet客户端:跨平台校园网联网解决方案
- 掌握lazycsv:C++中高效解析CSV文件的单头库
- FSDAF遥感影像时空融合python实现教程
- Envato Markets分析工具扩展:监控销售与评论
- Kotlin实现NumPy绑定:提升数组数据处理性能
