嵌入式应用中的加速度计与陀螺仪:融合与理解
需积分: 9 84 浏览量
更新于2024-09-10
2
收藏 415KB PDF 举报
"这篇指南详细介绍了加速度计和陀螺仪在嵌入式应用中的使用,特别是如何在Android手机上融合这两种传感器的读数。它涵盖了传感器的基本原理、数据转换方法以及简单的融合算法,旨在帮助开发者理解如何获取设备与地平面的精确倾角信息。文章强调使用基本的数学概念而不是复杂的滤波算法,并以一个6自由度的惯性测量单元为例进行讲解,包括LIS331AL三轴加速度计、LPR550AL双轴加速度计和LY550ALH单轴陀螺仪。"
在嵌入式系统中,加速度计和陀螺仪是惯性测量单元(IMU)的关键组成部分,用于跟踪设备的运动和姿态。加速度计能检测设备在三个轴上的线性加速度,通常以重力加速度“g”为单位。它可以帮助确定设备相对于重力的方向,但无法感知旋转或快速变化。
陀螺仪,又称为回转仪,能够测量设备围绕三个轴的角速度,单位通常是度/秒。它对于追踪设备的旋转非常有用,但随着时间的推移,陀螺仪的读数可能会累积误差。
为了获得更准确的设备姿态信息,通常需要将加速度计和陀螺仪的读数融合在一起。这种融合过程可以采用简单的互补过滤器,结合两者的优点来抵消各自的缺点。加速度计可以提供静态平衡位置,而陀螺仪则可以捕捉瞬时变化。通过定期校正加速度计读数,可以减小漂移,同时利用陀螺仪的数据来跟踪短期动态变化。
文章中提到的Acc_GyroAccelerometer+GyroIMU模块就是一个这样的例子,它结合了三个不同的传感器,分别对应于X、Y、Z轴的加速度和两个轴的角速度。在实际应用中,这种模块可以被用来实现各种功能,比如手机的屏幕自动旋转、虚拟现实设备的姿态控制或者无人机的稳定飞行。
在处理传感器数据时,重要的是要理解如何将传感器的原始ADC读数转换为实际的物理单位。这通常涉及到校准系数和单位转换。对于加速度计,可能需要将ADC值乘以标定系数再除以重力加速度(9.81 m/s²)。对于陀螺仪,可能需要考虑温度补偿和非线性响应。
尽管存在更高级的融合算法,如卡尔曼滤波器,但对于许多嵌入式系统来说,简单的互补过滤器可能更实际,因为它需要的计算资源较少。通过结合加速度计和陀螺仪的信息,可以创建一个相对简单但有效的系统,用于实时估算设备的倾角和姿态。
这篇指南深入浅出地介绍了加速度计和陀螺仪的工作原理、数据处理以及如何在实际项目中融合两者,为嵌入式开发人员提供了宝贵的知识和实践经验。
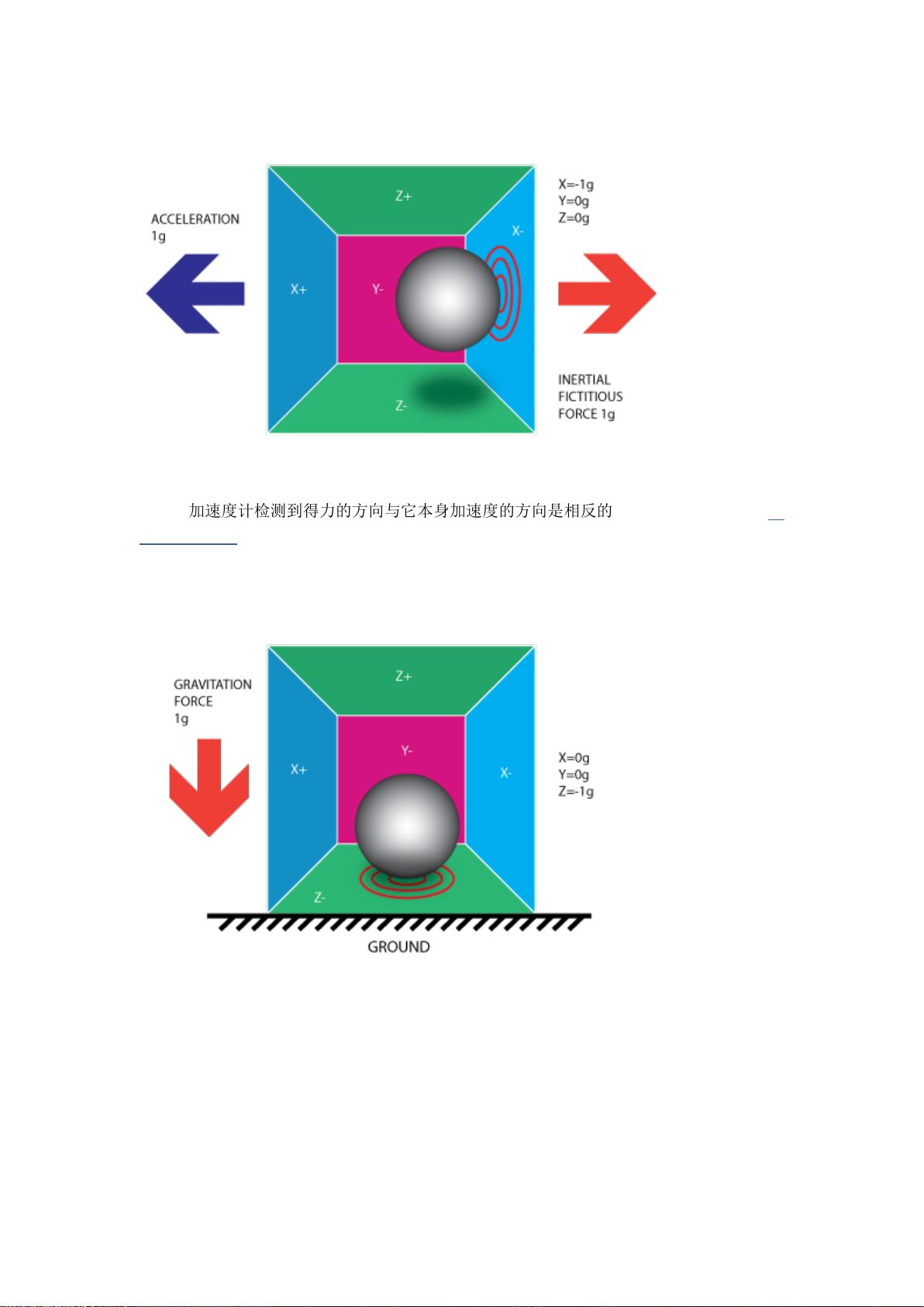
力,X 轴输出值为-1g。
请注意加速度计检测到得力的方向与它本身加速度的方向是相反的。这种力量通常被称为惯
性力或假想力 。在这个模型中你你应该学到加速度计是通过间接测量力对一个墙面的作用
来测量加速度的,在实际应用中,可能通过弹簧等装置来测量力。这个力可以是加速度引起
的,但在下面的例子中,我们会发现它不一定是加速度引起的。
如果我们把模型放在地球上,球会落在 Z-墙面上并对其施加一个 1g 的力,见下图:
在这种情况下盒子没有移动但我们任然读取到 Z 轴有-1g 的值。球在墙壁上施加的压力是由
引力造成的。在理论上,它可以是不同类型的力量 - 例如,你可以想象我们的球是铁质的,
将一个磁铁放在盒子旁边那球就会撞上另一面墙。引用这个例子只是为了说明加速度计的本
质是检测力而非加速度。只是加速度所引起的惯性力正好能被加速度计的检测装置所捕获。
虽然这个模型并非一个 MEMS 传感器的真实构造,但它用来解决与加速度计相关的问题相当
有效。实际上有些类似传感器中有金属小球,它们称作倾角开关,但是它们的功能更弱,只
能检测设备是否在一定程度内倾斜,却不能得到倾斜的程度。
剩余13页未读,继续阅读
2019-05-07 上传
2021-05-22 上传
2021-05-19 上传
点击了解资源详情
2021-10-02 上传
264 浏览量
2022-08-08 上传
点击了解资源详情

qq_25772817
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- C语言数组操作:高度检查器编程实践
- 基于Swift开发的嘉定单车LBS iOS应用项目解析
- 钗头凤声乐表演的二度创作分析报告
- 分布式数据库特训营全套教程资料
- JavaScript开发者Robert Bindar的博客平台
- MATLAB投影寻踪代码教程及文件解压缩指南
- HTML5拖放实现的RPSLS游戏教程
- HT://Dig引擎接口,Ampoliros开源模块应用
- 全面探测服务器性能与PHP环境的iprober PHP探针v0.024
- 新版提醒应用v2:基于MongoDB的数据存储
- 《我的世界》东方大陆1.12.2材质包深度体验
- Hypercore Promisifier: JavaScript中的回调转换为Promise包装器
- 探索开源项目Artifice:Slyme脚本与技巧游戏
- Matlab机器人学习代码解析与笔记分享
- 查尔默斯大学计算物理作业HP2解析
- GitHub问题管理新工具:GIRA-crx插件介绍
