PWM驱动下的仪表步进电机失步分析
需积分: 9 5 浏览量
更新于2024-09-07
收藏 479KB PDF 举报
"该文档详细分析了仪表步进电机在工作过程中出现失步现象的原因,并以AST310系列微型步进电机为例,探讨了如何通过PWM技术优化驱动以减少失步问题。文档中提到了步进电机的工作原理,特别是PWM技术在控制电机电流中的应用,以及微步驱动模式对稳定性和噪声降低的影响。此外,还介绍了步进电机的四象限工作模式和相关寄存器配置,包括加速度的计算方法,以确保在不同步距下平稳运行并防止失步。"
仪表步进电机失步分析主要涉及以下几个关键知识点:
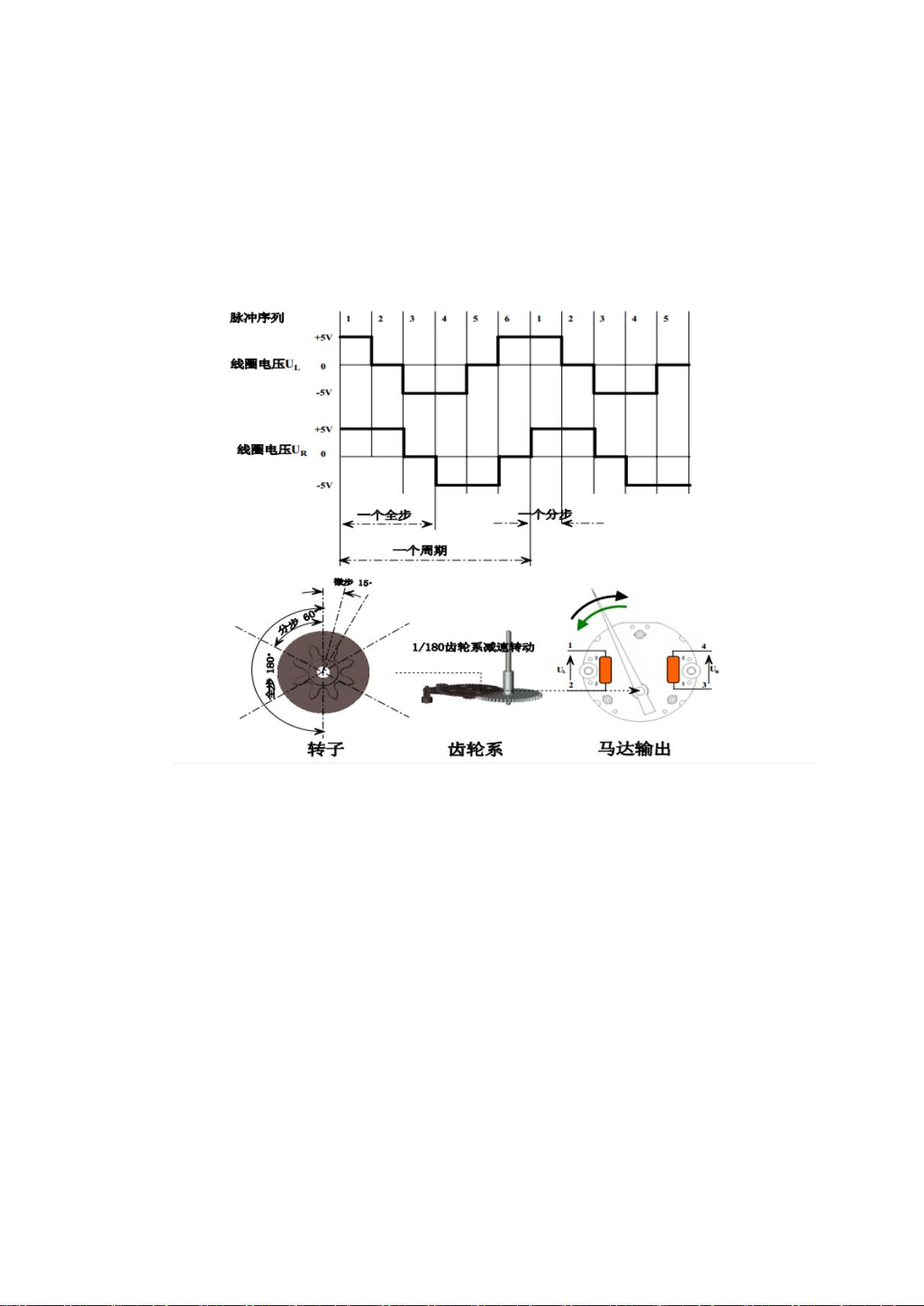
1. **步进电机工作原理**:步进电机是通过接收MCU的数字信号,转化为模拟控制电流来驱动电机。它将每个脉冲转换为固定角度的机械运动,通过改变脉冲的频率和数量来控制电机的速度和位置。
2. **PWM技术**:PWM(脉宽调制)是通过调整脉冲宽度来改变平均电流的技术。在步进电机中,PWM用于产生恒定电流,通过调节占空比来控制电机线圈中的电流大小,从而影响电机的转速和扭矩。
3. **AST310系列微型步进电机**:这款电机设计精密,能适应PWM驱动模式,减少了由驱动模式和驱动IC差异导致的失步问题。它采用微步驱动,提高精度和稳定性。
4. **微步驱动**:微步驱动将一个完整步进分为多个更小的微步,如24微步,这样可以更平滑地转动,减少振动和噪声。AST310系列电机每转12微步,指针走一步。
5. **四象限工作模式**:步进电机的驱动模式分为四个象限,每个象限对应不同的电流方向,确保电机在正转和反转时都能精确控制。
6. **寄存器配置**:包括RECIRC寄存器、MCPER和MCDTY寄存器,用于设置PWM输出、电机控制器周期和占空比,以匹配微步波形。
7. **加速度计算与控制**:在不同的步距下,需要适当的加速度控制以避免失步。例如,计算加速度时,可以根据中断时间间隔和步进电机的运动特性(如12微步转180度,1度指针转动需要12微步)来确定。
8. **PIT计时器和中断**:车速表和转速表利用PIT(周期定时器)产生中断,每次中断改变占空比,步进电机走一微步。通过调整中断时间和占空比,可以控制电机的步进速度。
通过对这些知识点的理解和应用,可以有效分析和解决仪表步进电机在实际工作中的失步问题,提高系统性能和可靠性。
一、工作原理
利用 MCU 的数字输出来对模拟电路进行控制的一种非常有效的技术。 PWM 技术
是采用脉宽调制方式,即占空比不同的方波电压产生不同的平均电流。由于电机线圈电
感对电流变化的阻碍作用,线圈中的电流波形围绕平均值上下波动,当 PWM 载波的频
率足够高时, 线圈中的电流可以看成为大小恒定电流。通过调节占空比可以产生不同
的平均电流。
AST310 系列微型步进电机由于其精密构造,可以完美适应 PWM 模式驱动,降低了
PWM 驱动模式和驱动 IC 的差异。
1. 转子走 180 度,指针走一步
2. 为了走步稳定和降低噪声,使用 24 微步(360 度/25=15 度),即电机转子走 12 微
步指针走一步
3. 微步驱动模式
下载后可阅读完整内容,剩余4页未读,立即下载
2019-10-24 上传
2021-08-07 上传
2023-10-04 上传
2023-03-28 上传
2023-05-19 上传
2023-03-29 上传
2024-01-15 上传
2023-05-14 上传
2023-07-14 上传

kerry_q
- 粉丝: 2
- 资源: 10
 我的内容管理
展开
我的内容管理
展开







最新资源
- C++标准程序库:权威指南
- Java解惑:奇数判断误区与改进方法
- C++编程必读:20种设计模式详解与实战
- LM3S8962微控制器数据手册
- 51单片机C语言实战教程:从入门到精通
- Spring3.0权威指南:JavaEE6实战
- Win32多线程程序设计详解
- Lucene2.9.1开发全攻略:从环境配置到索引创建
- 内存虚拟硬盘技术:提升电脑速度的秘密武器
- Java操作数据库:保存与显示图片到数据库及页面
- ISO14001:2004环境管理体系要求详解
- ShopExV4.8二次开发详解
- 企业形象与产品推广一站式网站建设技术方案揭秘
- Shopex二次开发:触发器与控制器重定向技术详解
- FPGA开发实战指南:创新设计与进阶技巧
- ShopExV4.8二次开发入门:解决升级问题与功能扩展
