
搬运码垛机器人旋转机构采用齿轮机构带动悬臂转动,槽轮每转一周,悬臂转动 90
°,从而实现机器人搬运工能。
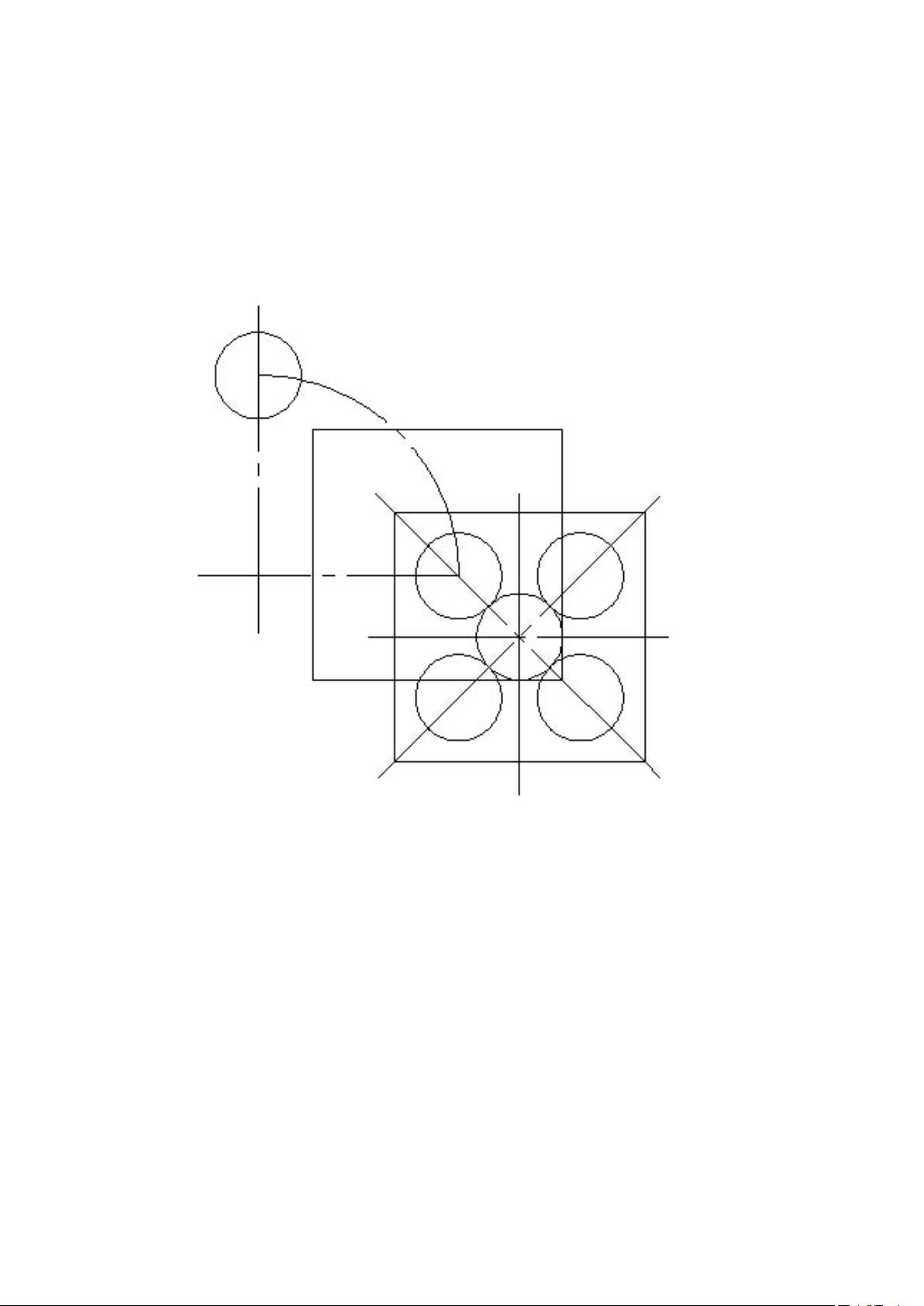
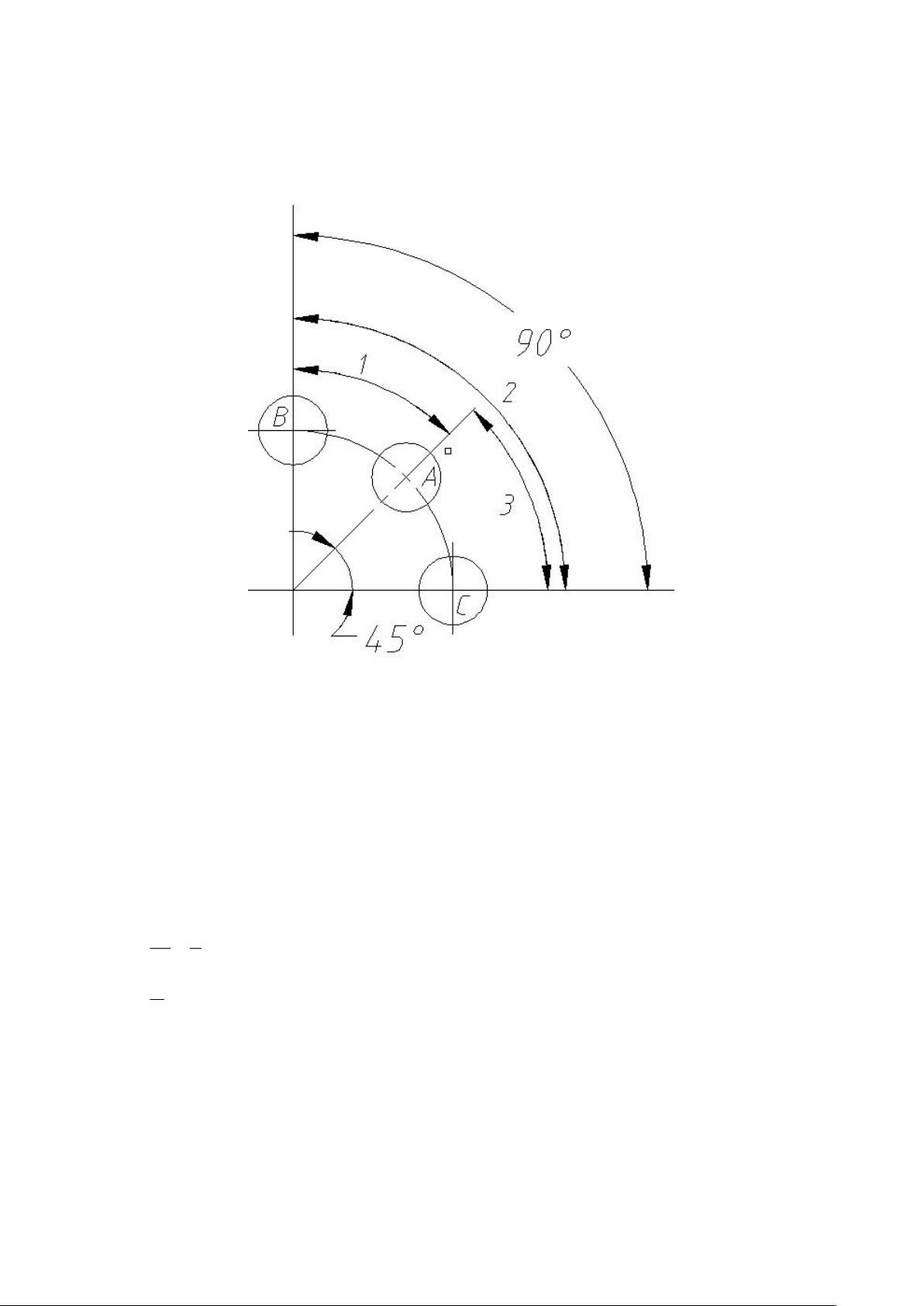
堆垛过程示意图如图(2-2)所示,采用用单销四槽槽轮机构和曲柄滑块机构组合
实现机器人的堆垛功能。
图(2-2)堆垛过程示意图
堆垛装置工作原理:每框的第一桶放在如图所示位置,然后通过曲柄滑块装置带动
和滑块连在一起的木桶动作到中间位置。以后每次动作将木桶放置到左上角,堆垛装置
旋转 90°,直至其余四个位置都被装满为一个循环。
剩余44页未读,继续阅读

老帽爬新坡
- 粉丝: 85
- 资源: 2万+

下载权益

电子书特权

VIP文章

课程特权
开通VIP
 我的内容管理
收起
我的内容管理
收起
- 我的资源
快来上传第一个资源
 我的收益 登录查看自己的收益
我的收益 登录查看自己的收益 我的积分
登录查看自己的积分
我的积分
登录查看自己的积分
 我的C币
登录后查看C币余额
我的C币
登录后查看C币余额
 我的收藏
我的收藏  我的下载
我的下载  下载帮助
下载帮助







