OpenDRIVE 1.6高清地图规范详解:架构、关系与核心要素
需积分: 5 123 浏览量
更新于2024-06-22
1
收藏 5.56MB PDF 举报
OpenDRIVE是一种用于创建、交换和共享高级驾驶辅助系统(HUD)、自动驾驶和车辆仿真中复杂道路网络的数据格式。它由ASAM(汽车电子协会)制定,1.6版于2020年1月14日发布,旨在提供一个标准化的方式来描述道路、车道、交通标志和其他相关信息,以便不同软件平台间的无缝协作。
1. **规范内容概览**
- OpenDRIVE规范包括多个章节,如前言、简介、与其他标准的关系、一般架构、附加数据、坐标系、几何、道路、车道、交界处以及对象等。这些章节详细定义了数据结构、属性和组织方式,确保了数据的标准化和一致性。
- **核心组成部分**:
- **档案结构**:定义了文件的整体组织,包括子文件夹和数据文件的层次关系。
- **坐标系**:阐述了不同的坐标参考框架,如惯性坐标系、参考线坐标系、局部坐标系,以及地理配准的重要性。
- **几何元素**:涵盖了道路参考线、直线、螺旋、弧线、三次多项式(已弃用)和参数三次曲线的描述。
- **道路**:定义了道路的属性、路段、横截面、高程处理、路面特性以及道路类型等。
- **车道**:涉及车道的划分、偏移、属性、标记和特定规则。
- **交界处**:详述了路口的设计,包括进入道路、连接道路和虚拟交界点的定义。
- **对象**:包括重复对象、轮廓描述等,可能涉及到路边设施、障碍物或行人区等。
2. **与相关标准的关系**:
- OpenDRIVE是ASAM活动中的一部分,旨在补充并与其他标准如OpenCRG和OpenSCENARIO协同工作,确保数据的互操作性。
- 提供了向早期版本的兼容性,确保现有项目可以平滑过渡到新规范。
- 引用其他相关标准,如可能涉及的道路工程、地理信息系统的数据标准等。
3. **翻译与注意事项**:
- 这份文档是由博主ISmileLi根据英文版OpenDRIVE规范进行翻译的,可能存在理解偏差或翻译错误,读者在使用时需注意理解和核实。
4. **应用领域**:
OpenDRIVE适用于各种与道路相关的软件开发,如模拟器、路径规划、自动驾驶算法的训练,以及车辆控制系统的集成,为实现高效的交通管理和智能驾驶提供了重要的数据基础。
高清地图-OpenDRIVE是一种强大的工具,通过标准化的数据结构和丰富的细节描述,支持复杂的道路模型,是现代汽车工程和智能交通系统的关键组成部分。掌握这一标准对于开发者和研究者来说,意味着能够更好地构建、共享和理解道路交通网络。
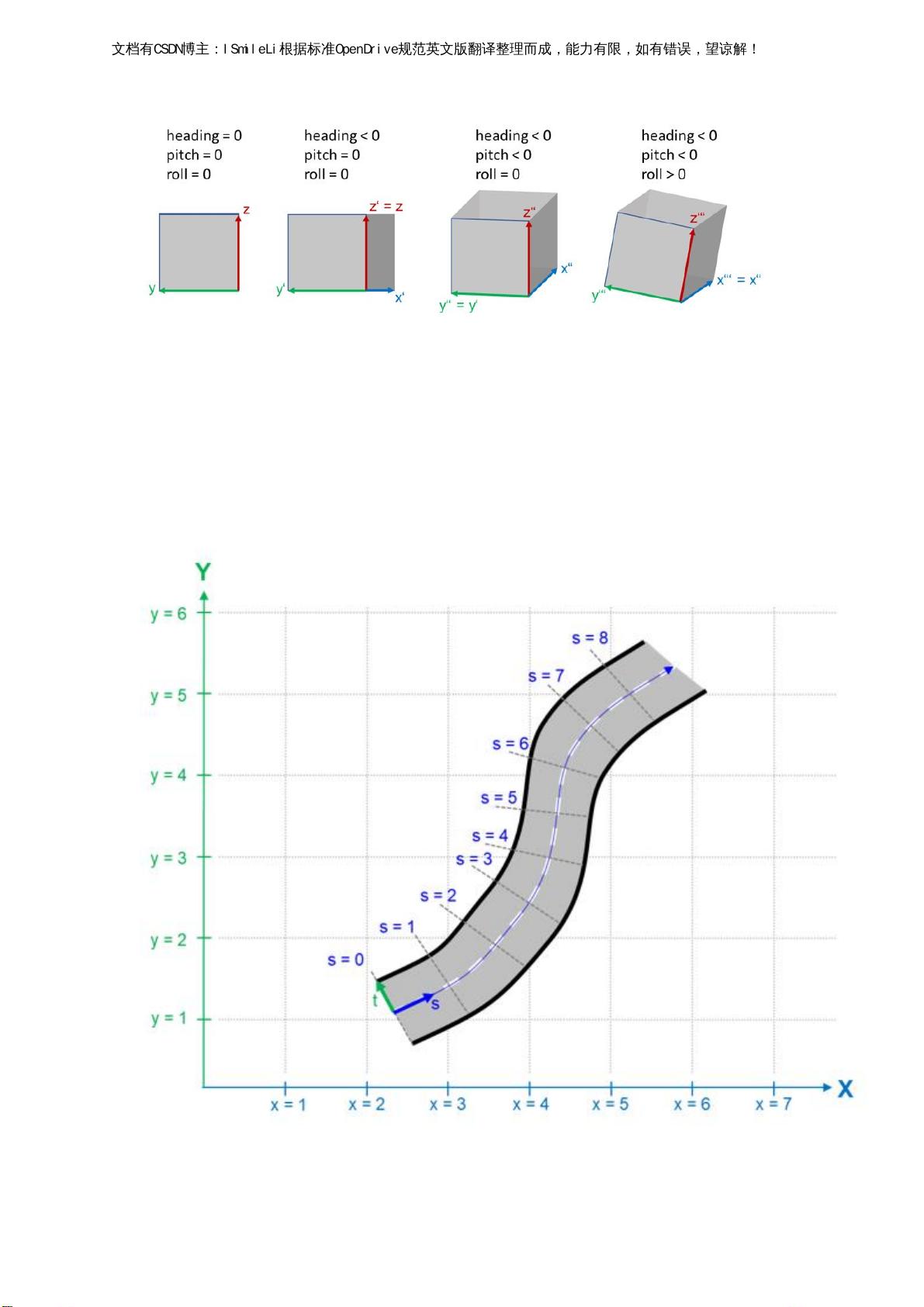
y⇒向上
z⇒从绘图平面出来
对于地理参考,适用以下约定:
x⇒东
y⇒北
z⇒向上
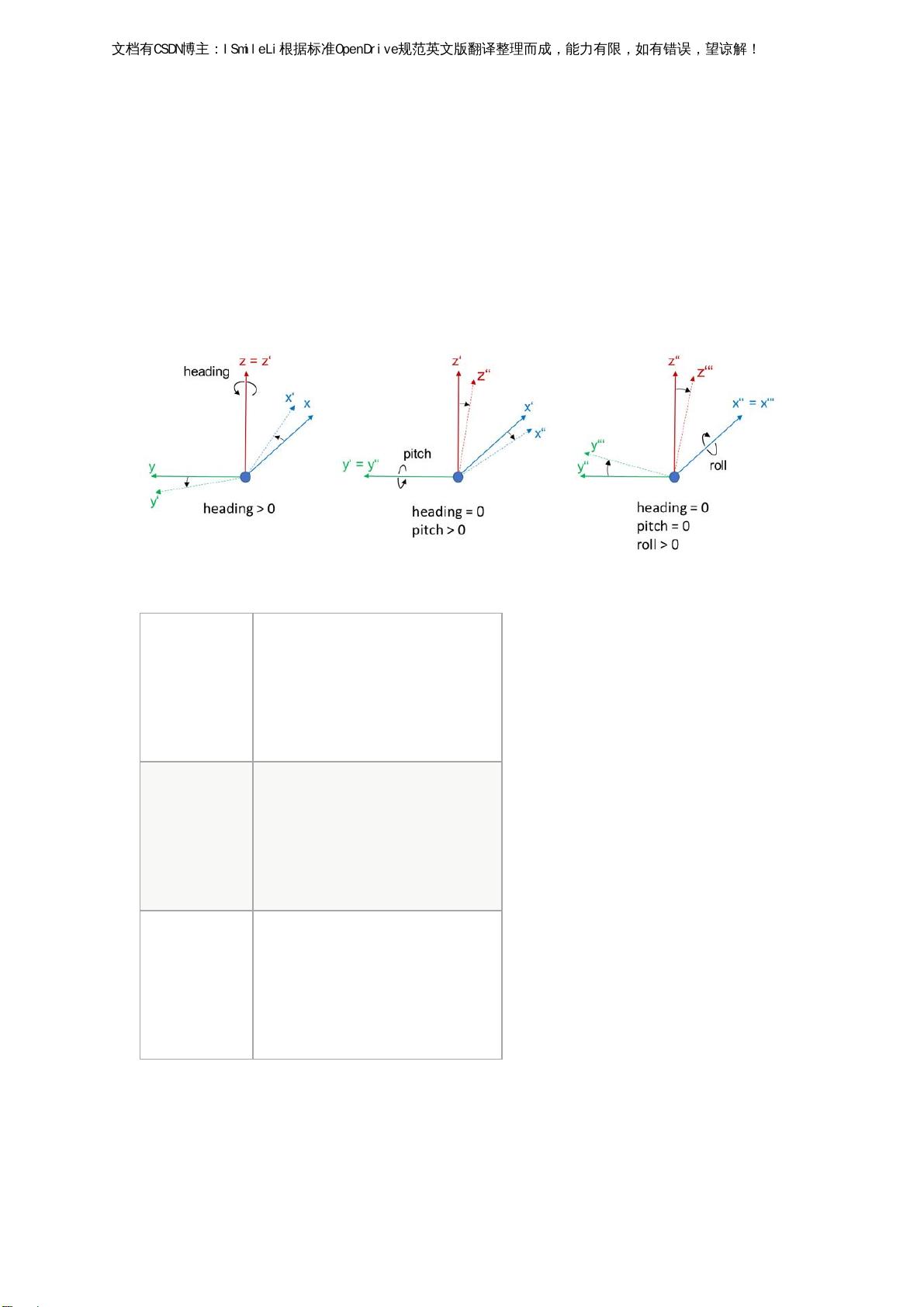
可以通过应用航向,俯仰,然后滚动来将诸如对象和信号之类的元素放置在惯性坐标系中:
图 7.定义旋转的惯性坐标系
图 7 示出了相应角度的正轴和正方向。
航向
= 0.0:
航向= +π/ 2:
绕 z 轴,其中
x'指向 x 轴方向/东
x'指向 y 轴方向/北
音调
音调= 0.0:
音调= +π/ 2:
绕
y'轴,其中 x''/ y''平面= x'/ y'平面
方向 x''=-z'= -z
滚动
滚动= 0.0:
滚动= +π/ 2:
围绕 x''轴,其中
x'''/ y'''-平面= x''/ y''-平面
方向 z'''=-y''
文档有CSDN博主:ISmileLi根据标准OpenDrive规范英文版翻译整理而成,能力有限,如有错误,望谅解!

剩余157页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2023-01-30 上传
2020-05-19 上传
234 浏览量
2023-07-13 上传
125 浏览量
2022-05-27 上传

chy104031
- 粉丝: 0
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- 英文翻译(毕业设计)
- 基于嵌入式操作系统VxWorks的多任务并发程序设计(5).PDF
- 基于嵌入式操作系统VxWorks的多任务并发程序设计(6).PDF
- 基于ASP.NET技术的通用编辑部网站设计与实现
- 卓有成效的程序员英文版
- Mastering_Perl_for_Bioinformatics
- java连接数据库大全
- C#入门中文版 菜鸟编程起步基础教程
- 地下水数值模拟模型验收实施方案
- 西门子PLC编程手册
- oracle常用命令
- Beginning.Python.From.Novice.to.Professional
- LM339集成块内部装有四个独立的电压比较器,该电压比较器的特点是:1)失调电压小,典型值为2mV;2)电源电压范围宽,单电源为2-36V,双电源电压
- 搜索引擎-原理、技术与系统
- HPUX企业级系统管理员手册
- TOAD 快速入门 oracle工具
