根轨迹法分析自动控制系统
需积分: 16 146 浏览量
更新于2024-07-30
收藏 4.63MB PPTX 举报
"北工业大学的自动控制原理课程17至24讲,主要讲解了根轨迹法及其在分析系统性能中的应用。"
本文将深入探讨自动控制原理中的根轨迹法,这是控制系统设计和分析中的一个重要工具。根轨迹法是一种研究系统稳定性、动态性能和控制品质的方法,它通过分析闭环极点随开环增益变化的轨迹来揭示系统的行为。
首先,根轨迹是系统闭环极点随着开环增益K从0变到无穷大时在复平面上的轨迹。这些轨迹的形成受到开环零点、开环极点以及K的影响。根轨迹的绘制需要满足模值条件和相角条件,这是确定轨迹形状的关键。模值条件规定了根轨迹的幅值变化,而相角条件则涉及轨迹的转向。
在绘制根轨迹时,有八条基本法则需要遵循。法则5,即渐近线法则,指出根轨迹在某些特定点的渐近行为;法则2涉及根轨迹的分支数、对称性和连续性;法则3说明了实轴上的根轨迹分布;法则4,根之和法则,用于确定根轨迹如何穿过实轴;法则6,分离点法则,定义了根轨迹分支的分离情况;法则7处理根轨迹与虚轴的交点;法则8则涉及根轨迹出射角和入射角的计算。
在分析系统性能方面,根轨迹法可以用来确定系统的稳定性范围。例如,可以通过观察根轨迹与虚轴的交点来确定闭环极点的位置,进而评估系统的稳定性和动态响应。欠阻尼状态通常对应于系统具有稳定的负实部闭环极点,这可以通过调整开环增益K来实现。
在实际应用中,我们需要根据题目要求,如例1和例2所示,逐步绘制根轨迹,确定闭环极点和零点的位置,然后利用零点极点法估计系统的性能指标,如上升时间ts、超调量σ%等。通过解方程和比较系数,我们可以找到满足特定条件的K值和闭环极点坐标,从而分析系统的动态响应。
北工业大学自动控制原理课程的这部分内容深入讲解了根轨迹法,它是理解复杂控制系统行为、优化系统性能和设计控制器的基础。通过实例解析,学生能够掌握根轨迹法的实际运用,提升其在控制系统设计中的理论和实践能力。
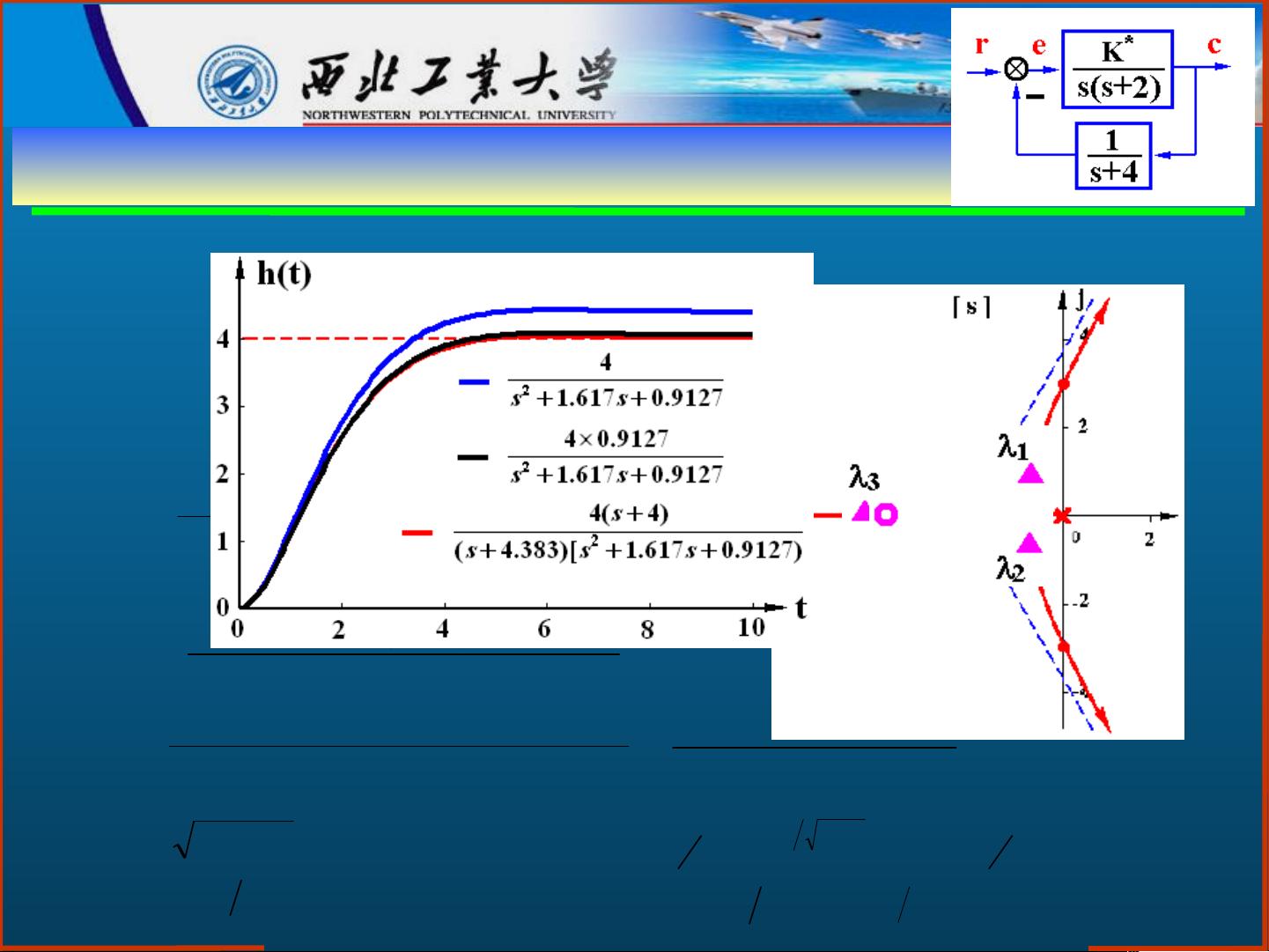
§4.4 利用根轨迹分析系统性能( 5 )
视
1,2
为主导极点
⑷ 当 K
*
=4 时, 求
1, 2, 3
并估算系统动态指标 ( ,t
s
)
4
383.4
509.0808.0
3
2,1
z
j
*
*
*
*
)4)(2(
)4(
)4)(2(
1
)2(
)(
Ksss
sK
sss
K
ss
K
s
)509.0808.0)[383.4(
)4(
*
4
*
jss
sK
K
)9127.0617.1)[383.4(
)4(4
2
sss
s
9127.0617.1
9127.04
2
ss
8463.0)955.02(617.1
955.09127.0
x
n
33.4808.05.35.3
689.0
0
0
1
0
0
2
ns
t
e
x
xx

剩余63页未读,继续阅读
点击了解资源详情
102 浏览量
358 浏览量
102 浏览量
2012-07-28 上传
2012-03-16 上传

panjiajing1234
- 粉丝: 0
- 资源: 4
 我的内容管理
展开
我的内容管理
展开







最新资源
- 常见网络命令使用!!!
- 用C#实现的电子商务的文档
- proteus7.1+keil8.08
- 《AVR单片机的GCC软件设计》.pdf
- PLC控制电冰箱的灯光大小
- 全国计算机等级考试四级数据库工程师教程 课后答案
- 单片机基础教程-入门级
- 基于索引的SQL语句优化之降龙十八掌
- 如何在局域网安装Redmine(原创)
- 计算机网络答案 谢希仁
- E:\ATA认证复习题\70-228SQL Server 2000企业版的安装、配置和管理模.pdf
- Flex 性能简评:Flex 和 JavaServer Pages 应用程序的比较
- linux下的调试工具-GDB
- 2009软件设计师考试大纲
- ExtJS 最新实用简明教程
- FAT32文件系统中文版
