2GHz 50-Ω示波器前端参考设计
需积分: 9 174 浏览量
更新于2024-07-15
收藏 1.42MB PDF 举报
"50-Ohm 2-GHz Oscilloscope Front-end Reference Design"
本文将详细解析2GHz示波器模拟前端设计的关键要素和技术特点,该设计适用于50欧姆输入系统,并能实现2GHz的信号带宽。设计旨在提供高精度、低噪声的信号处理能力,以满足高速数字和射频应用的需求。
设计特点:
1. **50欧姆输入**:模拟前端设计的核心是匹配50欧姆的阻抗,确保信号在传输过程中的最小反射,从而提高信号完整性。
2. **2GHz信号带宽**:这个设计能够捕捉并分析高达2GHz频率的信号,适用于高速数字电路测试和高速通信系统的调试。
3. **系统有效位数(ENOB)6至8位**:系统噪声和非线性效应被控制在较低水平,使得系统能够提供6到8位的有效数字精度,确保了测量的准确性和稳定性。
4. **最大输入信号±3V**:设计支持±3V的输入信号范围,适应各种电压等级的信号测试。
5. **可选择的输入耦合方式**:用户可以根据需要选择交流耦合或直流耦合。直流耦合模式下还提供了**直流偏置校正**功能,以消除由于输入信号中的直流分量导致的测量误差。
6. **前端π-衰减器**:提供了1:1, 2:1和5:1三种输入幅度电压调整设置,这允许用户根据实际信号大小和保护需求来调整输入信号的强度。
7. **单端转差分转换**:采用LMH5401低噪声高性能全差分放大器,将单端信号转换为差分信号,提高抗干扰能力并降低共模噪声。
8. **数字控制可变增益放大器**:LMH6401是一款高性能的数字控制可变增益放大器,它允许用户在程序中灵活调整增益,以适应不同信号幅度的测量需求。
9. **低噪声设计**:整个前端设计注重噪声性能,确保在高频率下也能获得清晰、无噪声的信号测量结果。
该设计结合了高性能的模拟组件和灵活的配置选项,为2GHz示波器的前端搭建了一个高效、精确的平台,适用于研发、生产测试以及故障排查等多个领域。通过使用TI的TINA-TI和WEBENCH工具,工程师可以进一步优化和定制这个参考设计,以满足特定应用的需求。
www.ti.com
4 50-Ohm 2GHz Oscilloscope Front-end Reference Design TIDUBA4-December 2015
Copyright © 2015, Texas Instruments Incorporated
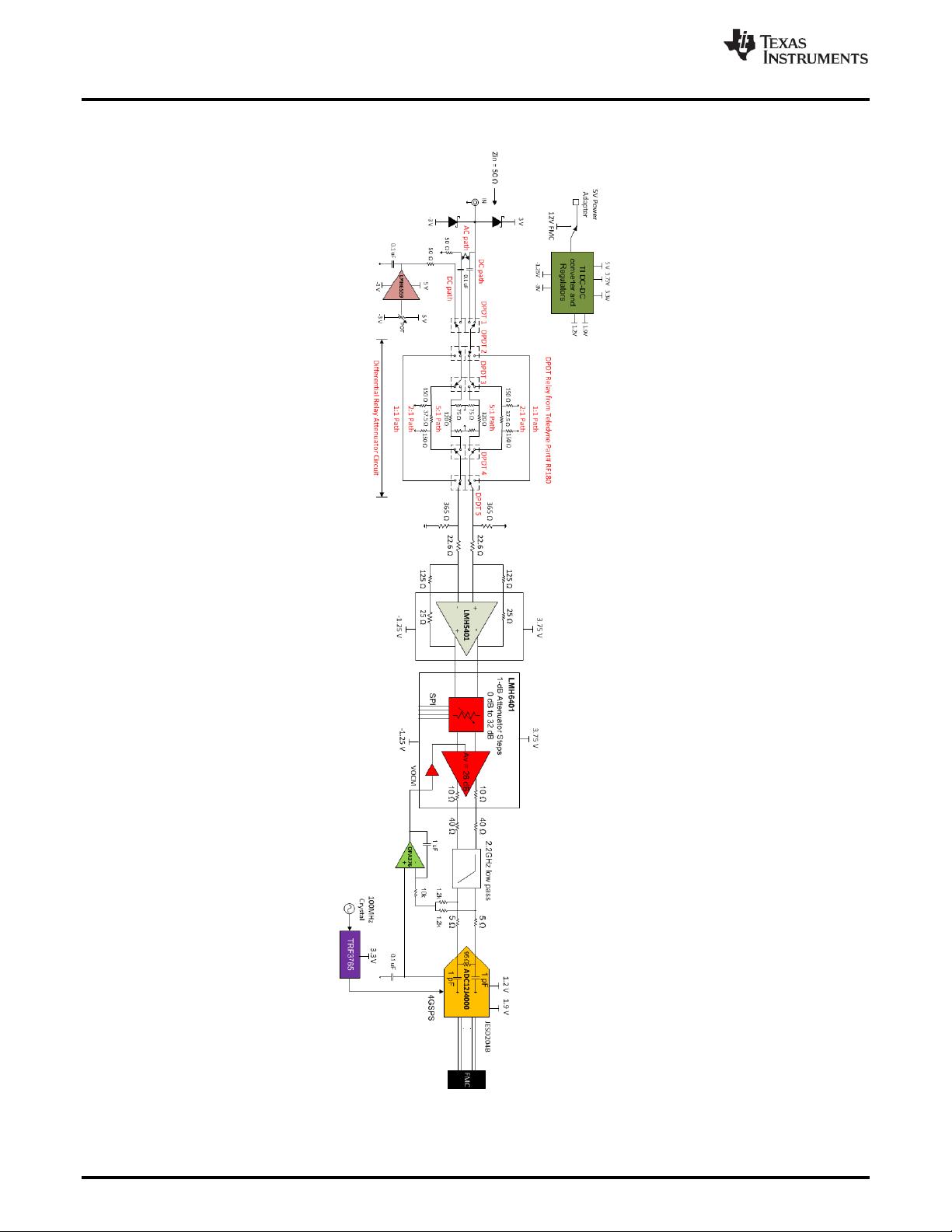
3 System Block Diagram
Figure 2: Complete System Block Diagram
剩余19页未读,继续阅读
2022-01-31 上传
2022-04-08 上传
2023-06-02 上传
2023-07-22 上传
2023-05-16 上传
2023-06-10 上传
2023-06-08 上传
2023-07-27 上传
2023-07-04 上传

WIRELESS_ROOM
- 粉丝: 86
- 资源: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- C语言快速排序算法的实现与应用
- KityFormula 编辑器压缩包功能解析
- 离线搭建Kubernetes 1.17.0集群教程与资源包分享
- Java毕业设计教学平台完整教程与源码
- 综合数据集汇总:浏览记录与市场研究分析
- STM32智能家居控制系统:创新设计与无线通讯
- 深入浅出C++20标准:四大新特性解析
- Real-ESRGAN: 开源项目提升图像超分辨率技术
- 植物大战僵尸杂交版v2.0.88:新元素新挑战
- 掌握数据分析核心模型,预测未来不是梦
- Android平台蓝牙HC-06/08模块数据交互技巧
- Python源码分享:计算100至200之间的所有素数
- 免费视频修复利器:Digital Video Repair
- Chrome浏览器新版本Adblock Plus插件发布
- GifSplitter:Linux下GIF转BMP的核心工具
- Vue.js开发教程:全面学习资源指南
