概率机器人:智能无人技术的核心
需积分: 9 120 浏览量
更新于2024-07-18
收藏 15.22MB PDF 举报
"概率机器人是Sebastian Thrun博士等三位学者合著的一本书,它探讨了如何将概率方法应用于机器人领域,以解决机器人在不确定性环境中的决策和感知问题。这本书从数学理论基础出发,深入到实际的机器人系统设计,旨在提升机器人的智能水平。"
在机器人学中,不确定性是一个无法回避的问题,因为机器人需要处理来自传感器的嘈杂数据、环境的不可预测变化以及自身动作的不确定性。"概率机器人"这一概念提出了一种新的框架,用概率理论来处理这些不确定性,使机器人能够更好地理解其周围环境并做出更准确的决策。
书中的第二章“递归状态估计”是核心内容之一,它介绍了一种关键的技术手段来处理不确定性。递归状态估计允许机器人实时更新其对自身状态(如位置、速度)以及环境状态的估计,通过与环境的交互来不断调整这些估计。书中详细讨论了基本的概率概念,如概率分布、机器人与环境的交互、概率生成定律以及信念分布。特别是,Bayes滤波算法被提出作为一种处理不确定性的有效工具,它能根据新数据不断修正先验知识,从而得到后验概率分布。
Bayes滤波算法包括了 Bayes 更新规则,通过数学推导可以证明其有效性,并且在满足马尔可夫假设的情况下,算法效率得以提高。然而,计算复杂性是实现这类算法的一大挑战,因此书中也探讨了表示和计算的方法,以平衡精度和计算效率。
第三章“高斯滤波器”进一步聚焦于一种特定的概率滤波器——卡尔曼滤波器,它是处理线性高斯系统的理想选择。卡尔曼滤波器利用线性系统和高斯噪声的特性,提供了一种优化的状态估计方法,特别是在噪声较小且系统动态线性的情况下,性能尤为突出。
"概率机器人"提供了概率方法在机器人学中应用的全面介绍,涵盖了从理论基础到具体算法实现的多个层面,对于理解和开发更智能、更能应对不确定性的机器人系统具有重要价值。这本书不仅适合机器人学研究人员和工程师,也对任何有兴趣了解如何利用概率模型提升机器人智能的读者有极大的参考价值。

4 Chapter 1
x
bel(x)
x
bel(x)
x
p(z|x)
x
bel(x)
x
bel(x)
x
p(z|x)
x
bel(x)
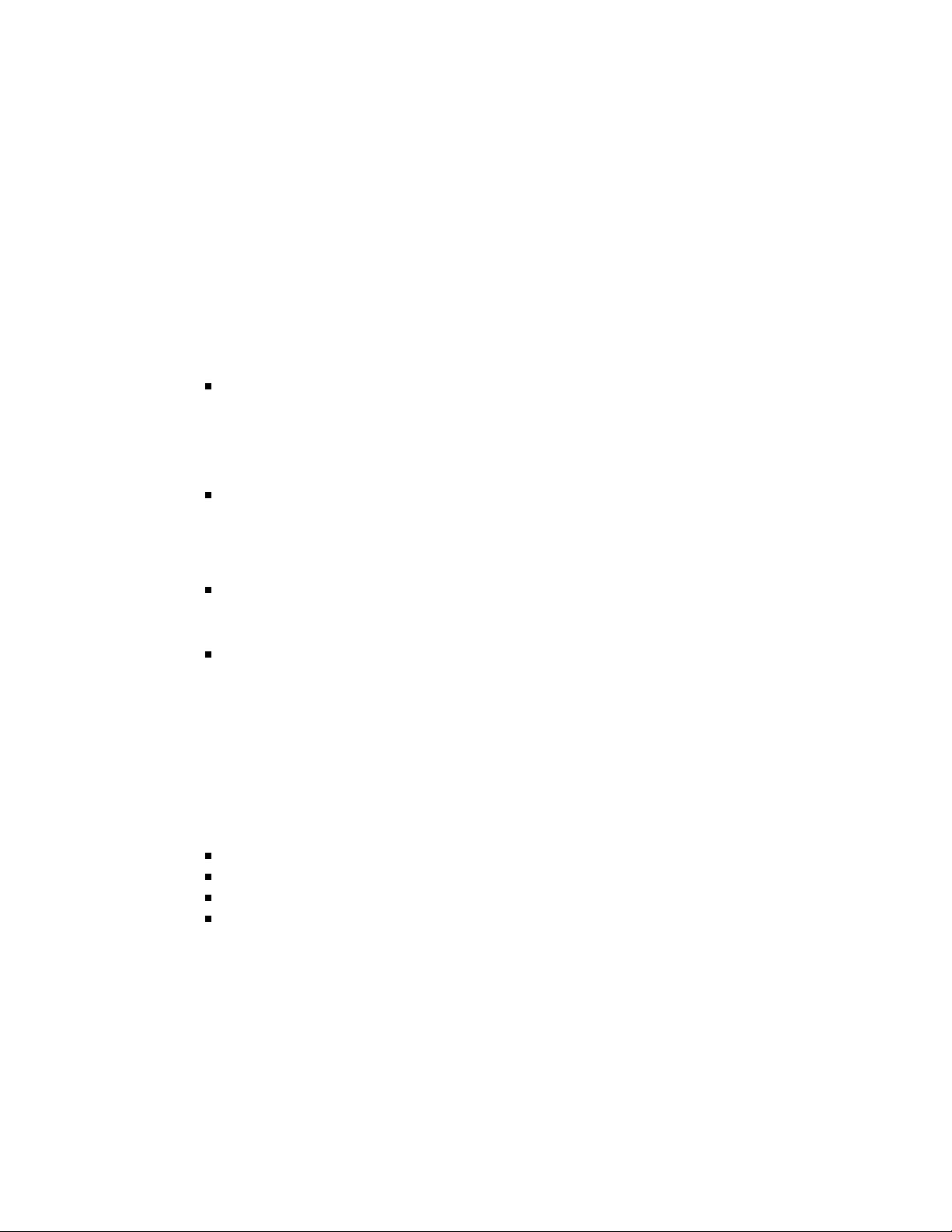
Figure 1.1 The basic idea of Markov localization: A mobile robot during global localiza-
tion.



剩余491页未读,继续阅读
2018-01-29 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
论文
点击了解资源详情

tbaofang
- 粉丝: 14
- 资源: 4
 我的内容管理
展开
我的内容管理
展开







最新资源
- ExtJS 2.0 入门教程与开发指南
- 基于TMS320F2812的能量回馈调速系统设计
- SIP协议详解:RFC3261与即时消息RFC3428
- DM642与CMOS图像传感器接口设计与实现
- Windows Embedded CE6.0安装与开发环境搭建指南
- Eclipse插件开发入门与实践指南
- IEEE 802.16-2004标准详解:固定无线宽带WiMax技术
- AIX平台上的数据库性能优化实战
- ESXi 4.1全面配置教程:从网络到安全与实用工具详解
- VMware ESXi Installable与vCenter Server 4.1 安装步骤详解
- TI MSP430超低功耗单片机选型与应用指南
- DOS环境下的DEBUG调试工具详细指南
- VMware vCenter Converter 4.2 安装与管理实战指南
- HP QTP与QC结合构建业务组件自动化测试框架
- JsEclipse安装配置全攻略
- Daubechies小波构造及MATLAB实现
