PLC控制下的机械手设计与关键技术
版权申诉
138 浏览量
更新于2024-07-03
收藏 663KB DOC 举报
本研究文档详细探讨了"基于PLC的机械手设计",这是一个结合了机械、电子、检测、控制和计算机技术的综合性项目。该设计的主要目标是创建一个具备基本搬运功能的机械手,以适应现代社会生产和生活中的自动化需求。
首先,作者在引言部分强调了随着科技的进步,机器人,特别是机械手,已经在众多领域如海洋开发、医疗、服务业等发挥着重要作用。工业机器人因其可编程性、多功能性和灵活性,不仅能提升产品质量和产量,还能够改善工作环境,减轻劳动强度,降低生产成本。
机械手设计的核心内容包括:
1. 总体方案设计:明确设计要求,根据应用场景选择合适的运动形式,如直线运动、旋转运动等,同时考虑驱动方式,比如电动或气动驱动。总体结构设计需确保机械手的稳定性和可靠性。
2. 手部设计:这部分着重于机械手的手指或夹持部分,涉及结构分析和计算分析,确保抓取和搬运工件的精确性和安全性。
3. PLC控制系统设计:这是关键环节,机械手移动工件控制系统的控制要求包括精确定位、速度控制和路径规划。PLC的选择要考虑其性能、价格和与硬件的兼容性,资源配置要合理,程序编写则需遵循标准步骤,确保指令执行的准确性。
4. 动画制作:利用计算机辅助设计(CAD)软件,构建机械手的三维模型,然后制作出动态的动画,便于理解和展示设计过程及机械手的工作原理。
总结起来,本文档深入剖析了基于PLC的机械手设计,从需求分析到系统实现,展示了机械手如何结合PLC技术来实现智能化操作,对于理解工业自动化和机械工程领域的最新进展具有很高的参考价值。关键词“机械手”、“PLC”和“动画”突出了论文的核心技术内容,表明了其在现代工业生产中的实用性和前景。
(6)存在工作死区。
4.多关节机器人
多关节机器人结构简图如图 1-4 所示,它是以其各相邻运动部件之间的相
对角位移作为坐标系的。θ、α 和 φ 为坐标系的坐标,其中 θ 是绕底座铅垂轴的
转角,φ 是过底座的水平线与第一臂之间的夹角,α 是第二臂相对于第一臂的
转角。这种机器人手臂可以达到球形体积内绝大部分位置,所能达到区域的形
状取决于两个臂的长度比例。其特点是:
(1)动作较灵活,工作空间大。
(2 关节驱动处容易密封防尘。
(3)工作条件要求低,可在水下等环境中工作。
(4) 适合于电动机驱动。
(5)运动难以想象和控制,计算量较大。
(6)不适于液压驱动。
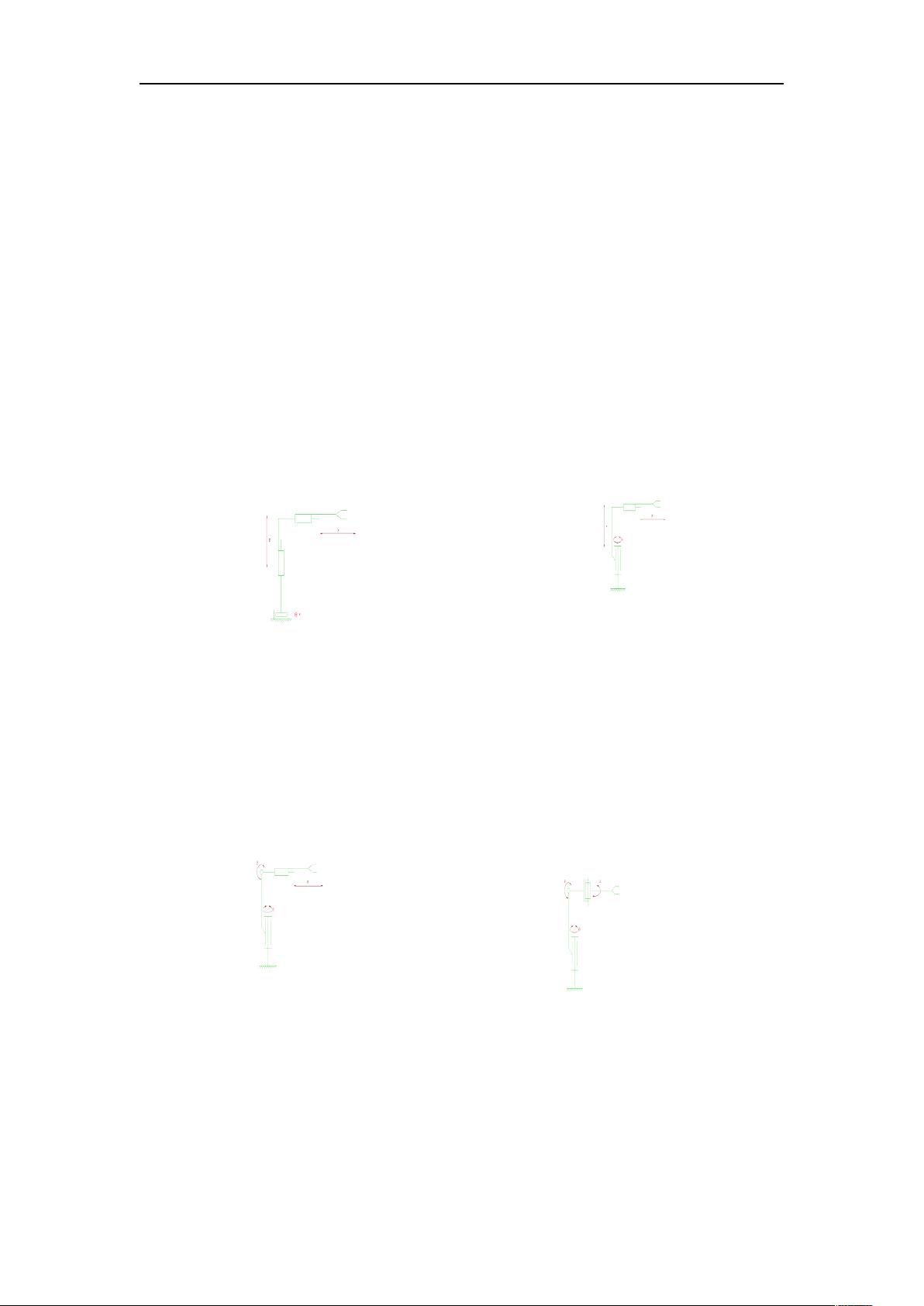
图 1-1 直角坐标型 图 1-2 圆柱坐标型
图 1-3 极坐标型 图 1-4 多关节型
选择方案的准则:
1.满足设设计要求:机械手能够旋转一定角度。
2.结构简单,便于计算分析。
分析比较以上四种运动形式,确定选用圆柱坐标型机器人。
剩余18页未读,继续阅读
2022-04-10 上传
2022-04-19 上传
2022-03-23 上传
2022-06-26 上传
2022-12-03 上传
2023-06-21 上传
2023-06-21 上传
2023-06-21 上传
2024-07-02 上传

智慧安全方案
- 粉丝: 3836
- 资源: 59万+
 我的内容管理
展开
我的内容管理
展开







