
International Conference on Control, A
u
Oct. 27-30, 2010 in KINTEX, Gyeong
g
1. INTRODUCTIO
N
Welding automation is used in v
a
fields. Orbital welding machine is deve
l
diameter pipe welding to huge diame
t
For over 200mm diameter
p
ipe
w
carriage sets up inside or outside of t
h
surfaces have to be cut precisely each s
i
There are many studies to trace the
using contact or noncontact type se
n
welding automation
.[1-3]
Contact typ
e
analog signals from size of the bendi
n
measured by the prove. There has be
e
sensor, electromagnetic sensor, op
t
noncontact type sensors. An arc s
e
weaving motion. Sensing height is rest
r
an electromagnetic sensor.
There has been developed visio
displacement sensor, laser vision s
e
sensors. A vision sensor directly captu
r
a laser displacement sensor uses dot las
e
equipment. Optical type sensors are
p
influenced by environmental effect.
A
Laser Vision Sensor(LVS) is stable, p
r
shape of the welding groove. The L
V
laser module, mirror, vision sensor.
T
discharges line laser. The mirror refl
e
center of the vision sensor, images ar
e
vision sensor.
V-groove is carved in the cylinder f
o
set of center points of the V-groov
e
captured images. Tracking and estima
t
applied to trace the welding path.
T
sharp-edged line. It is important to trac
e
at the corner.
A study on the w
e
T
a
S
e
1
Department of Mechan
i
(Tel :
+
2
Technology Innovation Cente
r
(Tel
3
High Safety Vehicle Core Tech
n
(Tel :
4
UNICK
C
(Te
l
Abstract: This paper suggests one
o
measured by the LVS(Laser Vision S
e
images. Center points of the welding
transformed to robot coordinates
b
y
c
robot, cylinder, LVS. The rolling cylin
d
robot follows the V-groove. The trac
k
correlation of a set of groove center po
i
of error. Thus, the
p
rocess of error data
Keywords: Laser Vision Sensor, tracki
u
tomation and Systems 2010
g
i-do, Korea
N
a
rious industrial
l
oped from small
t
e
r
pipe welding.
w
elding, welding
h
e pipe. Contact
i
de of pipes.
welding path by
n
sors in field o
f
e
senso
r
s outputs
n
g stress that are
e
n developed arc
t
ical sensor as
e
nsor is needed
r
icted when using
n sensor, laser
e
nsor as optical
r
es welding spo
t
,
e
r and measuring
p
recise, but it is
A
dvantage of the
r
ecious, showing
V
S is composed
T
he laser module
e
c
t
s line laser to
e
captured by the
o
r experimen
t
. A
e
is obtained by
t
io
n
algorithm is
T
he path forms
e
the line exactly
2. SYSTEM CO
N
The cylinder alternates
pi
motor is driven to spin t
h
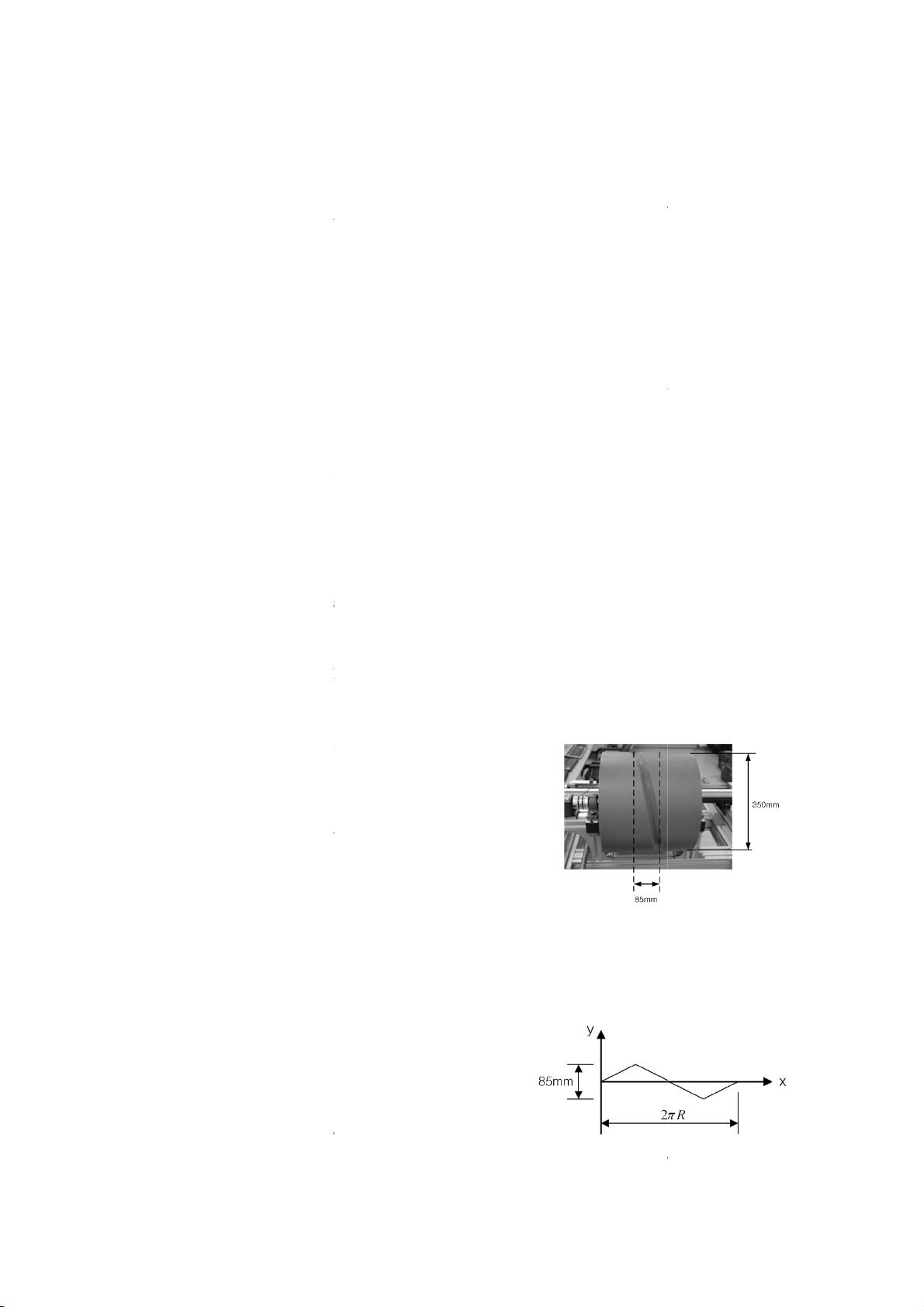
Dimension of the cylinder i
s
Diameter of the cylinder i
welding path is 85mm. L
e
cylinder is determined as 9
5
the V-groove are 30mm and
1
Fig. 1 Dimension
Fig. 2 shows the unr
o
experiment is implemented i
n
velocity respectively.
Fig. 2 Dimension o
f
e
lding seam tracking by using Laser Visio
n
a
ewook Kim
1
and Seungbeom Lee
4
and
e
unghwan Baek
2
and Kwangsuck Boo
13
i
cal Engineering, Inje University, Gimhae city, Gyeon
g
+
82-55-320-3186; E-mail:
ktwchi23@naver.com
)
r
for Automotive Parts, Inje University, Gimhae city,
G
: +82-55-320-3753; E-mail:
shbaek@inje.ac.kr
)
n
ology Research Cente
r
, Inje University, Gimhae city
,
+82-55-320-3753; E-mail:
mechboo@inje.ac.kr
)
C
ORPORATION, Gimhae city, Gyeongnam, Korea
l
: +82-55-340-2000; E-mail:
krbug@nate.com
)
o
f the pre-measurement methods to trace a welding
e
nsor). A line laser is projected on the weldment a
n
path are detected through image processing. Meas
u
c
oordinate transformatio
n
s. The experimental struct
u
d
e
r
that is carved V-groove generates the continuous
w
k
ing algorithm is applied to generate the welding
pa
i
nts. It is important that the robot traces the welding
pa
distinction and modification is implemented through
t
ng algorithm, robot welding, path planning
N
FIGURATION
i
pe to be welded. A DC
h
e cylinde
r
continuously.
s
shown in Fig. 1, Fig. 3.
s 350mm. Width of the
e
ngth between LVS and
5
mm. Width and height of
1
5mm respectively.
of the cylinder.
o
lled welding path. The
n
5mm/s, 10mm/s, 15mm/s
f
the welding path.
n
Sensor
g
nam, Korea
G
yeongnam, Korea
,
Gyeongnam, Korea
path. The welding path is
n
d a vision sensor captures
u
red image coordinates are
u
re is composed by 1-axis
w
elding path and the 1-Axis
a
th that is obtained by the
a
th accurately in the margin
t
he estimation algorithm.
978-89-93215-02-1 98560/10/$15 ©ICROS
779
下载后可阅读完整内容,剩余3页未读,立即下载

xindouding
- 粉丝: 0
- 资源: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- zlib-1.2.12压缩包解析与技术要点
- 微信小程序滑动选项卡源码模版发布
- Unity虚拟人物唇同步插件Oculus Lipsync介绍
- Nginx 1.18.0版本WinSW自动安装与管理指南
- Java Swing和JDBC实现的ATM系统源码解析
- 掌握Spark Streaming与Maven集成的分布式大数据处理
- 深入学习推荐系统:教程、案例与项目实践
- Web开发者必备的取色工具软件介绍
- C语言实现李春葆数据结构实验程序
- 超市管理系统开发:asp+SQL Server 2005实战
- Redis伪集群搭建教程与实践
- 掌握网络活动细节:Wireshark v3.6.3网络嗅探工具详解
- 全面掌握美赛:建模、分析与编程实现教程
- Java图书馆系统完整项目源码及SQL文件解析
- PCtoLCD2002软件:高效图片和字符取模转换
- Java开发的体育赛事在线购票系统源码分析
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


