库卡机械手操作系统界面详解及操作指南
需积分: 16 133 浏览量
更新于2024-07-29
收藏 723KB PDF 举报
"库卡机械手操作界面说明书"
库卡机械手是一款先进的工业机器人,其操作界面设计得直观且功能强大。本说明书旨在详细介绍如何有效使用该操作界面,包括各个功能区域及其作用。
1. 界面布局
- 菜单栏:提供主要的功能选项,如新建、打印、存档等。
- 功能选择栏:显示可执行的任务或功能。
- 命令栏:用于执行选定的操作。
- 操作栏:允许用户通过鼠标或键盘控制机器人的移动。
- 路径栏:显示当前工作路径或程序的位置。
- 程序栏:列出已加载的程序,可以进行编辑、运行或存储。
- 对话框:用于输入信息或确认操作。
- 状态栏:显示系统的当前状态和反馈信息。
2. 操作模式
- 确认:用于确认对话框中的信息,可以是单个或全部。
- 操作模式选择:切换鼠标或键盘操作,以控制机器人移动。
3. 文件管理
- 新建:创建新的文档或文件夹。
- 打印:打印当前程序。
- 存档:保存数据到软盘,可以是全部信息或特定部分。
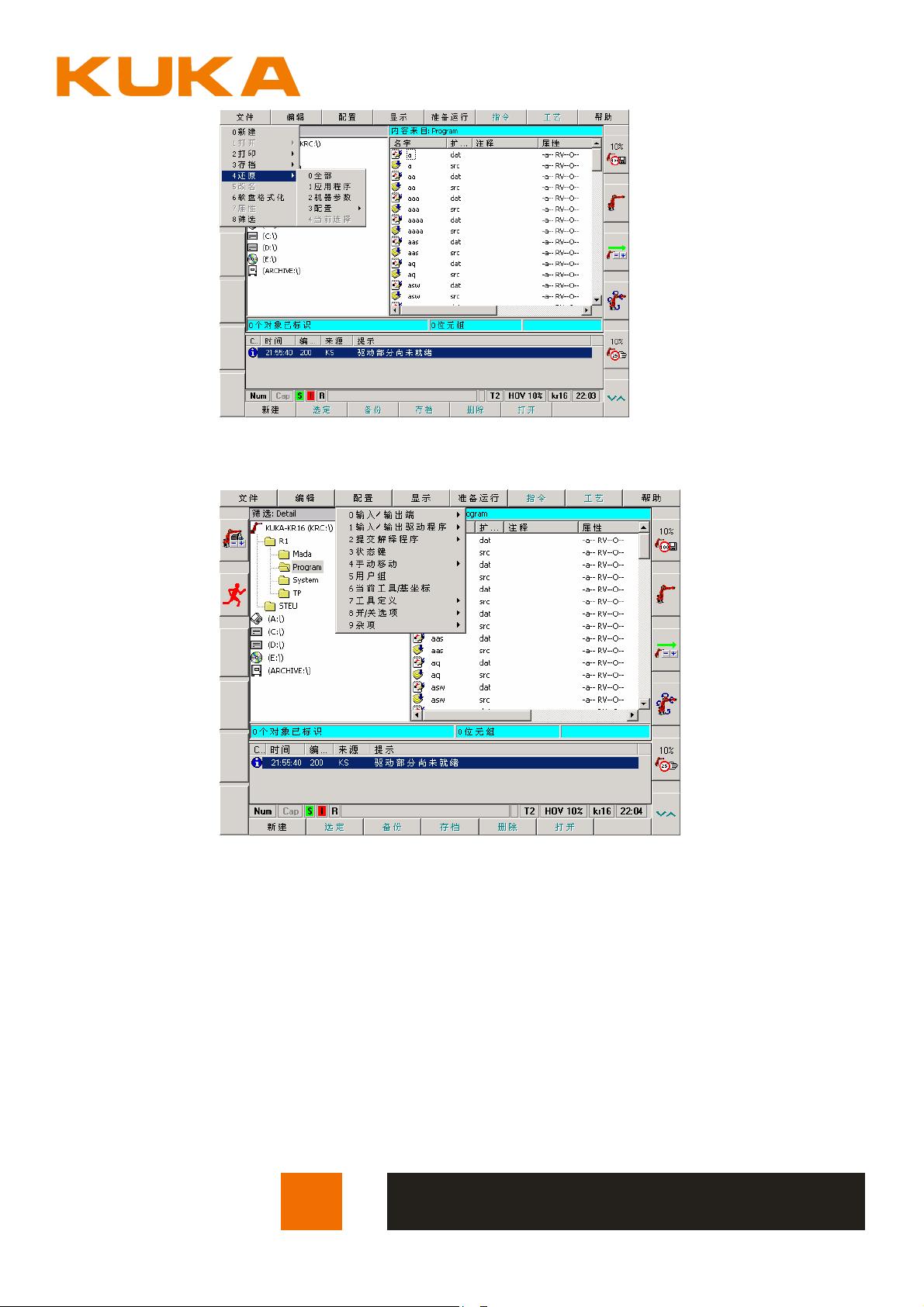
- 还原:恢复之前保存的资料。
- 软盘格式化:格式化控制柜内的软盘。
4. 资源管理器模式
- 全部存档:存档所有信息,可能因程序过多而失败,需分开存档。
- 应用程序:存档程序栏中的所有程序。
- 机器参数:存档不同型号机器人的参数。
- 配置:包括登陆数据、输入/输出端配置等。
- 输入/输出端:配置机器人与外围设备的通讯接口。
- 输入/输出长文本:配置基本通讯协议。
- 库卡工艺包:配置针对特定行业的工艺软件。
5. 存档与还原
- 存档:将资料备份到软盘,包括应用程序、机器参数、配置等。
- 还原:将备份的资料恢复到系统中。
6. 输入/输出端管理
- 外部自动:配置端口信息,一般不建议随意更改。
- 输入/输出端驱动程序:管理输入/输出端口的驱动。
- 驱动器复位:重置所有输入/输出端口的配置。
- 输入/输出状态:检查输入/输出系统的运行状态。
- 线性通讯:用于直接与外部系统进行TCP/IP通讯。
7. 系统控制
- 启动/选择:启动或选定系统定义文件。
- 停止:停止运行的系统定义文件。
- 退出:退出所有系统定义文件。
- 提交解释程序:控制程序的执行速度。
- 手动移动:允许用户手动控制机器人的移动。
- 程序进程步骤开/关:调整程序执行的速度。
库卡机械手操作界面提供了一套全面的工具,让用户能够高效地控制和管理机器人操作,同时确保了与外部设备的有效通讯。理解和熟练使用这些功能对于优化工业生产流程至关重要。
5
请参看存档,还原即将存档的资料重新拷贝回机器人
输入/输出端:->
输入/输出端驱动程序->
提交解释程序->
状态键:如果有安装库卡工艺包,则功能选择栏会出现相应的功能键
手动移动->
用户组:有三个对应选项:用户,仅可以进行基本操作;专家:可以使用高阶编程语句进行软
件编写;管理员:可以对系统配置进行更改。
当前工具/基坐标:当前系统所用的工具类型或者基坐标类型。在正常情况下只有更换焊枪系
统以及外部轴系统需要用到此功能
工具定义:->
开/关选项:->
杂项:->
还原
配置
剩余21页未读,继续阅读
2021-11-17 上传
2023-02-22 上传
2017-05-16 上传
2023-03-03 上传
179 浏览量
2017-08-02 上传
2015-08-26 上传
2014-11-13 上传
2018-12-28 上传

stupid_ghost
- 粉丝: 4
- 资源: 11
 我的内容管理
展开
我的内容管理
展开







最新资源
- StarModAPI: StarMade 模组开发的Java API工具包
- PHP疫情上报管理系统开发与数据库实现详解
- 中秋节特献:明月祝福Flash动画素材
- Java GUI界面RPi-kee_Pilot:RPi-kee专用控制工具
- 电脑端APK信息提取工具APK Messenger功能介绍
- 探索矩阵连乘算法在C++中的应用
- Airflow教程:入门到工作流程创建
- MIP在Matlab中实现黑白图像处理的开源解决方案
- 图像切割感知分组框架:Matlab中的PG-framework实现
- 计算机科学中的经典算法与应用场景解析
- MiniZinc 编译器:高效解决离散优化问题
- MATLAB工具用于测量静态接触角的开源代码解析
- Python网络服务器项目合作指南
- 使用Matlab实现基础水族馆鱼类跟踪的代码解析
- vagga:基于Rust的用户空间容器化开发工具
- PPAP: 多语言支持的PHP邮政地址解析器项目
