PID控制原理与应用
需积分: 19 3 浏览量
更新于2024-07-25
收藏 717KB PPT 举报
"PID控制原理简介"
PID控制是自动控制领域中最基本且最广泛使用的控制算法,自诞生以来已有近70年的历史。它的主要优点包括结构简单、稳定性高、工作可靠性强以及调整便利。PID控制器由比例(P)、积分(I)和微分(D)三部分组成,通过这三个部分的联合作用,可以有效地调节系统的动态性能。
1. 比例(P)部分:比例控制是立即响应当前的误差,即输出与误差成正比。这种实时响应能够迅速减小误差,但可能引起系统的振荡。
2. 积分(I)部分:积分控制负责消除稳态误差,通过积累过去的误差来调整输出。随着时间的推移,即使小的持续误差也会导致输出的变化,从而达到零误差的目标。
3. 微分(D)部分:微分控制预见未来的误差趋势,通过对误差变化率的响应来减少超调和振荡。它可以提供系统的快速响应,但过多的微分作用可能导致系统不稳定。
在实际应用中,PID控制器通常通过软件实现,如在计算机控制系统中。这样的软件实现赋予了PID更大的灵活性,可以进行参数调整和优化,以适应各种复杂的控制任务。
全闭环伺服系统是PID控制的一个典型应用场景,其中位置检测器安装在工作台上,形成一个反馈回路。这种设计使得定位误差仅取决于位置检测器的精度,而不受传动部分的影响。在这样的系统中,PID控制器根据来自位置检测器的反馈信息调整电机的控制信号,如PWM(脉冲宽度调制)。
PWM调速驱动原理在直流电动机速度控制中扮演关键角色。通过改变脉冲宽度(占空比),可以调节电机的平均输入电压,进而改变电机的转速。然而,控制PWM与电机转速之间的关系并不总是直接的,因为电机的转速还受到负载的影响。这就是为什么PID控制器能发挥重要作用,通过不断调整PWM的占空比,以适应负载变化并保持所需的转速。
PID控制原理及其在PWM调速和全闭环伺服系统中的应用,展示了其在工业自动化领域的核心地位。通过不断地学习和优化,PID控制器能持续改进控制性能,确保系统的稳定性和精确性。
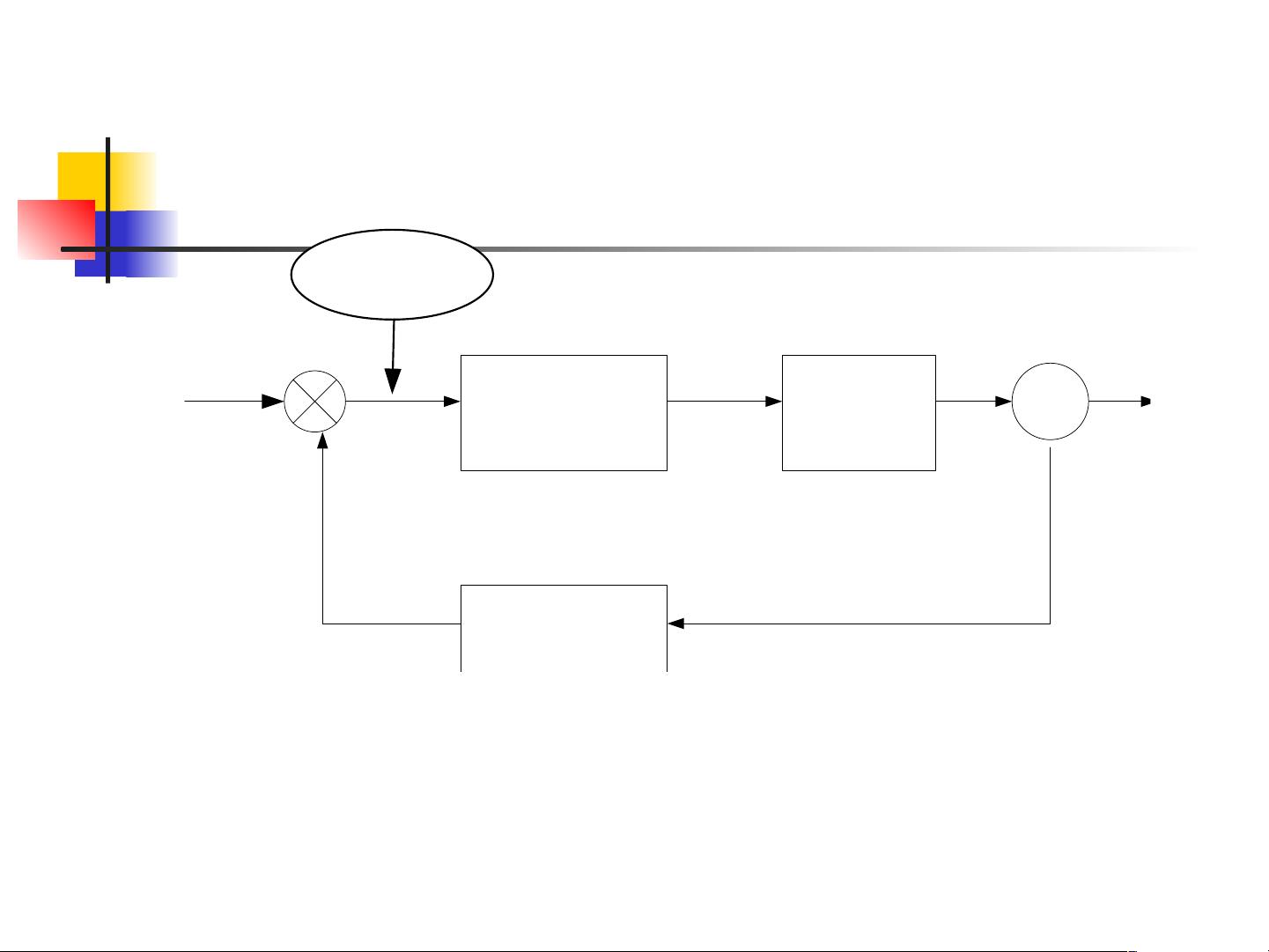
M
PID算法
速度反馈
PWM
驱动
+
-
速
度
设
定
速度差
剩余20页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
117 浏览量
115 浏览量
4557 浏览量

help_wei
- 粉丝: 1
- 资源: 47
 我的内容管理
展开
我的内容管理
展开







最新资源
- PlantManager
- wlab-pro.github.io
- TaskToobig
- django-ra-erp:一个基于Django的框架,用于创建各种业务解决方案,并配有报告引擎和响应式仪表板
- PVsyst.v5.03.Multilingual.rar
- linphoneDoc.rar
- seckill:秒杀系统
- 50个动画图标 .aep .gif素材下载
- 易语言libcurl库7.73.0板源码+demo
- TaskItalic
- azure-k3s-cluster:使用k3s.io部署轻量级Kubernetes群集的Azure模板
- java邮件发送demo.rar
- More.Effective.C.rar
- caleydo.github.io:Caleydo网站
- handle-write-xx:手写***
- TaskDouble
