51单片机控制步进电机加减速正反转汇编程序
需积分: 10 131 浏览量
更新于2024-10-17
1
收藏 164KB DOC 举报
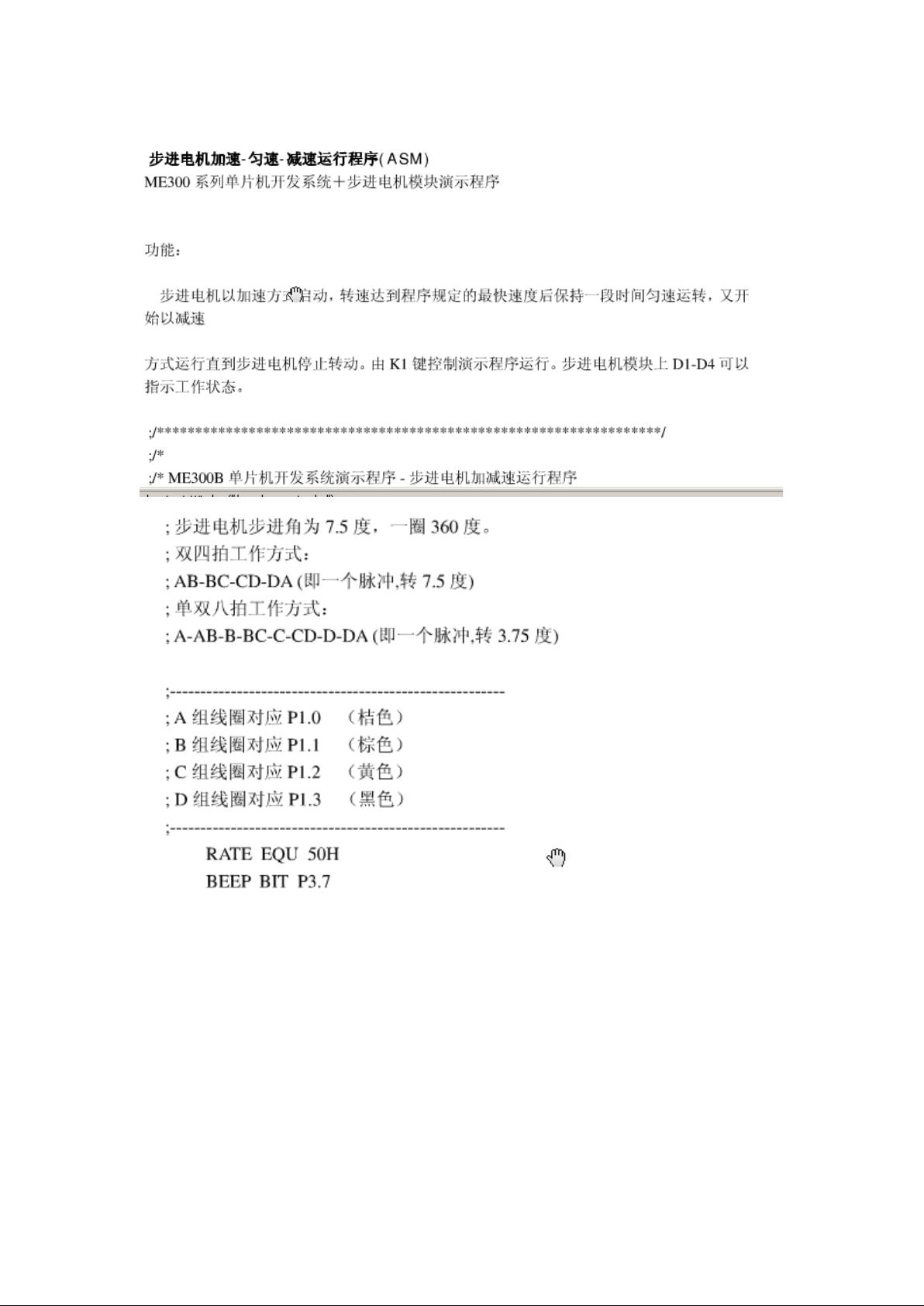
"51单片机控制步进电机加减速正反转的汇编语言程序"
在51单片机的控制系统中,步进电机是一种常见的执行元件,它通过接收脉冲信号来精确控制其转动角度。这个程序的目的是实现步进电机的正反转,并且在启动时逐渐加速,达到设定速度后保持匀速运转,然后逐渐减速至停止。程序使用了汇编语言编写,这是一种底层编程语言,能够对硬件进行直接控制,以实现更高效和精确的操作。
首先,程序中提到了步进电机的步进角为7.5度,这意味着每接收到一个脉冲,电机就会旋转7.5度。步进电机的工作方式有多种,本程序采用的是双四拍和单双八拍工作方式。双四拍模式下,电机在AB-BC-CD-DA四个状态间切换,每次切换代表电机转动7.5度。而单双八拍模式下,电机在A-AB-B-BC-C-CD-D-DA八个状态间切换,每个脉冲电机转动3.75度。程序中没有明确指定工作方式,但根据描述,可能是在某个阶段采用了其中一个方式。
电机的控制线圈与51单片机的P1口相关联,具体分配如下:
- A组线圈对应P1.0,颜色为桔色
- B组线圈对应P1.1,颜色为棕色
- C组线圈对应P1.2,颜色为黄色
- D组线圈对应P1.3,颜色为黑色
程序中定义了一个名为RATE的常量,值为50H,这可能代表电机的脉冲频率或者速度控制参数。此外,BEEPBIT被设置为P3.7,这可能是用来指示电机状态或操作的蜂鸣器控制位。K1BIT被设置为P1.4,这个位用于控制程序的开始和停止,通过按键K1触发。
在主程序(MAIN)中,首先设置了堆栈指针SP和P1口的初始值,然后将速度变量RATE设为10H。程序通过判断按键K1的状态来决定是否开始电机的运动。当K1被按下时,会调用BEEP_BL子程序发出提示音,然后开始电机的加速、匀速和减速过程。
在实际运行中,程序会根据设定的速率变化规律,通过改变发送到步进电机的脉冲频率来实现加减速效果。在电机加速阶段,脉冲频率逐渐增加;达到预定速度后,保持一段时间的匀速运行;最后,在减速阶段,脉冲频率逐渐减小,直至电机完全停止。
这个程序为学习51单片机控制步进电机提供了一个基础示例,通过理解并分析这个程序,可以了解到如何使用汇编语言编程来实现步进电机的精细化控制。同时,也可以在此基础上进行扩展,比如增加更复杂的加减速曲线、加入反馈机制以实现闭环控制等。
下载后可阅读完整内容,剩余7页未读,立即下载
173 浏览量
112 浏览量
点击了解资源详情
215 浏览量
1023 浏览量
2010-06-24 上传
398 浏览量

信仰ysu
- 粉丝: 5
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- An Introduction to GCC
- linux环境高级编程
- bf561的详细资料
- JSP页面编辑器,可实现像Word一样编辑页面
- cet4-6核心单词
- MODELSIM经典教程.pdf
- JavaScript for Breakfast.[pdf]
- powerdesigner使用建议
- 神州数码DCS3926
- Keil7.5与proteus6.7完美结合教程
- 路由器快速配置手册发布文档V1[1].3
- 2008全国职业院校技能大赛自动线装配与调试竞赛项目样题
- 2008全国职业院校技能大赛电子产品装配与调试技能竞赛试题
- Tomcat安装_CHS
- ObjectPascal中文参考手册
- Modeling Web Application Architecture With UML
