STM32F407驱动下的四旋翼无人机控制系统优化与比较
版权申诉
151 浏览量
更新于2024-06-19
2
收藏 4.47MB PDF 举报
随着工业的持续发展,电力需求的增加对稳定可靠的供电设施提出了更高的要求。微电子技术的进步为无人机技术的崛起奠定了基础,特别是在电力巡检、农业灌溉等领域,四旋翼无人机因其灵活性和多功能性得到了广泛应用。四旋翼无人机的独特之处在于它是一个典型的四输入六输出欠驱动系统,这使得其控制系统的设计成为了学术研究的热门课题。
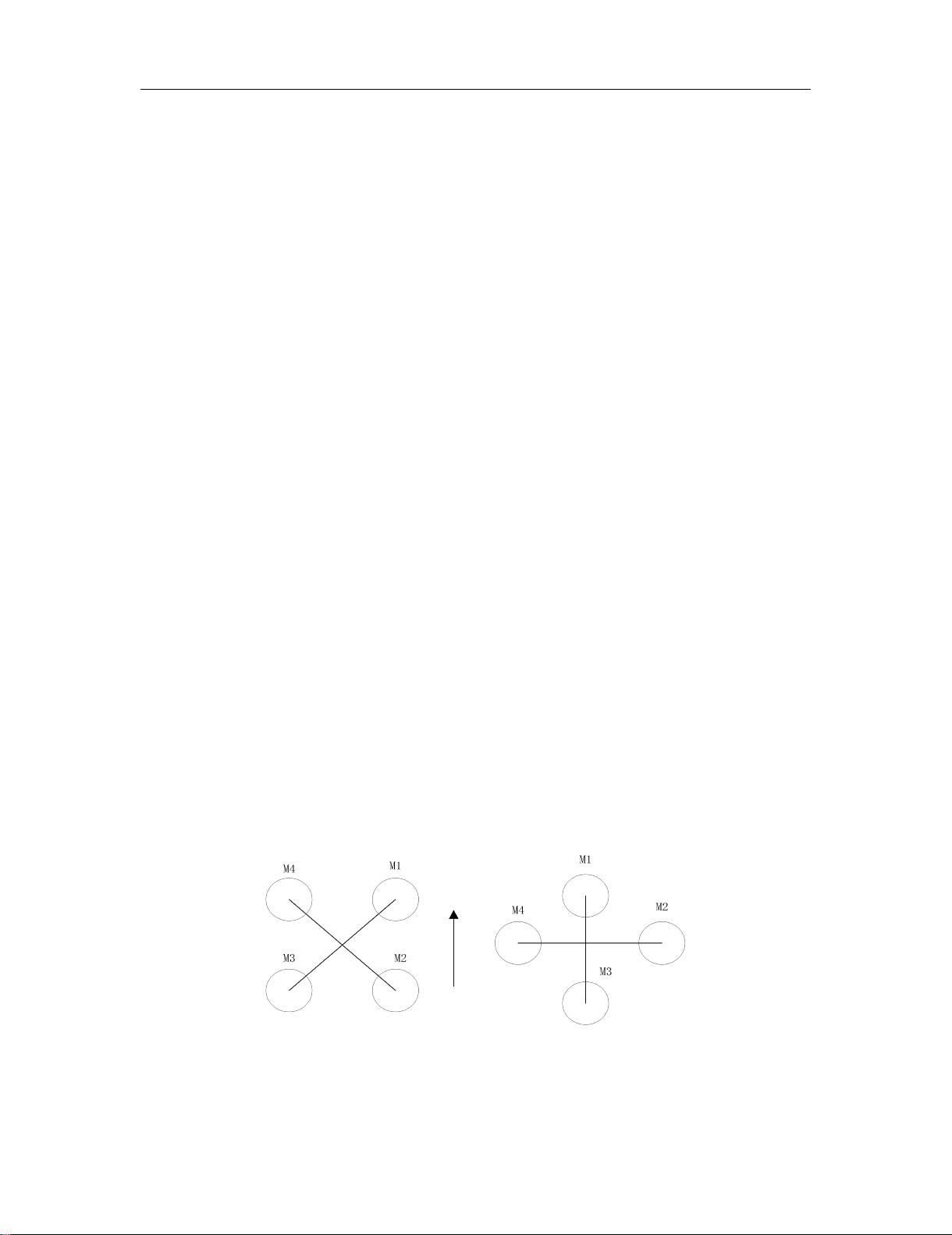
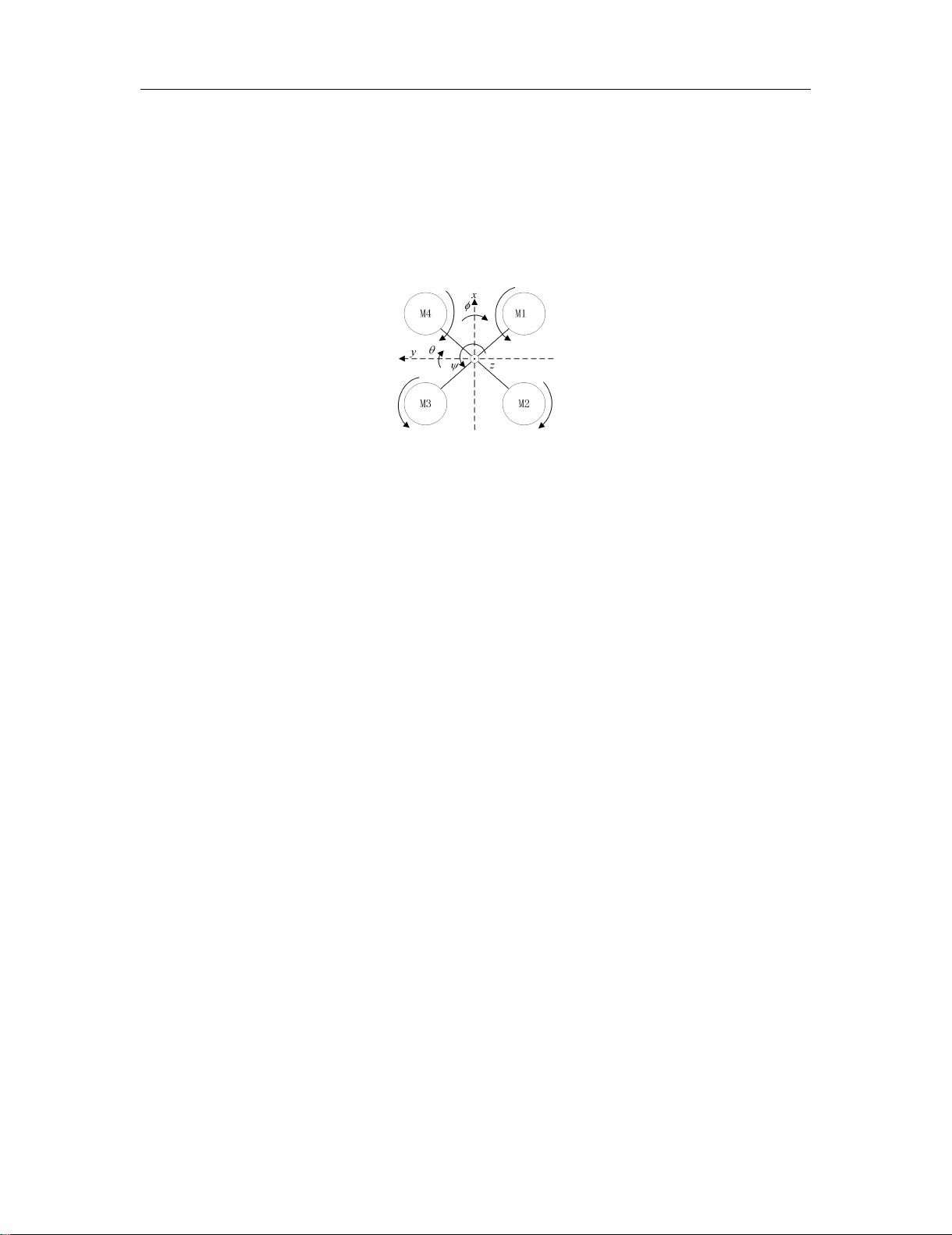
本篇毕业论文致力于设计并构建一个基于BLDC( brushless DC)电机驱动的四旋翼无人机控制系统。首先,作者深入剖析了四旋翼无人机的基本结构,包括其五种基本的物理运动状态,通过对无人机的受力分析,利用牛顿-欧拉方程构建了非线性系统模型,这是理解和控制无人机的关键步骤。
论文接着详述了选用STM32F407作为核心控制器的无人机整体架构,对各个模块和组件进行了精心选型,并设计了相应的电路图,确保了硬件平台的实现。STM32F407以其高性能和强大的计算能力,为实现无人机精确控制提供了强大的支持。
软件设计是论文的核心部分,作者详细探讨了主要控制电路的软件流程图,包括姿态控制系统的设计。通过对三个关键姿态角的控制研究,进行了非线性模型的线性化处理,以便于更有效地进行控制算法的实施。文中对比了传统的PID(比例积分微分)控制、模糊PID控制以及改进后的粒子群模糊PID算法。
在仿真模型的构建阶段,通过Simulink平台,作者评估了三种控制策略的效果,结果显示改进后的粒子群模糊PID算法表现出更快的响应速度,更小的振荡范围以及更强的抗干扰能力。最后,通过实际飞行试验验证了所设计控制系统的有效性和实用性,证实了使用改进粒子群模糊PID算法的控制系统在实际应用中的优越性能。
本论文围绕PID控制、粒子群算法、STM32F407微控制器、四旋翼无人机以及MATLAB软件工具,深入探讨了如何构建一个高效、稳定的无人机控制系统,对于推动无人机技术在工业和科研领域的应用具有重要意义。

天津理工大学硕士学位论文 第一章 绪论
7
12 月,极飞科技推出 P40 2021 农业无人机,如图 1.10 所示。这款和农业相关的无
人机使用人工智能方图技术,准确地喷洒在需要的地方,最大限度地节约了成本,
为农业无人机树立了标杆
[32]
。
图 1.9 P20 植保无人机 图 1.10 P40 植保无人机
综上所述,四旋翼无人机的硬件设计,以及控制算法还有多种传感器数据融合
控制是主要研究的几个方向。四旋翼无人机由刚开始简单的起飞降落,逐渐地应用
到其他的领域,无人机的飞行更加灵活且更具实用性。在无人机领域,研究人员不
断在硬件方面进行改进,比如改进机身的材料和对螺旋桨,使之达到很好的效果。
目前,有许多数据融合算法,卡尔曼滤波算法使用较多,姿势估计方法主要是余弦
矩阵表示的姿势解析算法,还有四元数表示的空间姿势解析算法
[33]
。当无人机位于
山沟、隧道等环境中,由于遥控信号无法及时传递,使得它无法根据遥控发出的信
号进行操作,这就要求无人机必须通过其所配备的更多传感器实现数据的融合处理,
达到更好的控制效果。
1.3 本文研究的主要内容
本文主要以实验室搭建的四旋翼无人机当作主要研发对象和实验平台,将无人
机飞行的空中姿态控制系统当作重点的研究对象。在分析了四旋翼无人机的控制器
基本原理的基础上,形成了四旋翼无人机控制器的总体结构;然后,利用相应的数
学知识构建了动力学模型,并在此模型的基础上完成了四旋翼的飞机控制器的总体
设计,各模块软件流程的设计以及控制算法的仿真试验。
论文的主要内容如下:
第二章介绍了四旋翼无人机系统建模。具体包括无人机的结构与工作原理,选
取合适的坐标系,对无人机的数学模型进行分析。
第三章研究了关于无人机控制系统的软件流程以及硬件电路。其中主要包括了:

剩余72页未读,继续阅读
2024-12-07 上传
2025-02-28 上传
2024-07-24 上传
363 浏览量
2025-02-27 上传
2025-02-12 上传
244 浏览量
459 浏览量
248 浏览量


icwx_7550592
- 粉丝: 21
 我的内容管理
展开
我的内容管理
展开







最新资源
- 易酷免费影视系统:开源网站代码与简易后台管理
- Coursera美国人口普查数据集及使用指南解析
- 德加拉6800卡监控:性能评测与使用指南
- 深度解析OFDM关键技术及其在通信中的应用
- 适用于Windows7 64位和CAD2008的truetable工具
- WM9714声卡与DW9000网卡数据手册解析
- Sqoop 1.99.3版本Hadoop 2.0.0环境配置指南
- 《Super Spicy Gun Game》游戏开发资料库:Unity 2019.4.18f1
- 精易会员浏览器:小尺寸多功能抓包工具
- MySQL安装与故障排除及代码编写全攻略
- C#与SQL2000实现的银行储蓄管理系统开发教程
- 解决Windows下Pthread.dll缺失问题的方法
- I386文件深度解析与oki5530驱动应用
- PCB涂覆OSP工艺应用技术资源下载
- 三菱PLC自动调试台程序实例解析
- 解决OpenCV 3.1编译难题:配置必要的库文件
