SATA 2.0协议详解:修订1.0扩展与特性
SATA 2.0协议是Serial ATA (串行高级硬盘接口)技术的一个重要升级版本,它在SATA 1.0的基础上进行了扩展和优化。发布于2002年10月16日,由APT Technologies、Dell Computer Corporation、Intel Corporation、Maxtor Corporation和Seagate Technology LLC等公司联合制定。这一规范的1.0修订版,也称为"Final Specification",可以在www.serialata.org网站上获取。
SATA 2.0的主要改进点包括:
1. **带宽提升**:与SATA 1.0相比,SATA 2.0的最大数据传输速度翻了一番,达到了300MBps(兆比特每秒),比SATA 1.0的150MBps有了显著提高。这使得更快的数据读写成为可能,支持更高级别的存储设备性能。
2. **更高速的信号传输**:采用了更先进的信号处理技术和电缆设计,减少了串行数据传输中的延迟,提高了信号质量,从而实现更高的数据传输速率。
3. **支持热插拔和电源管理**:SATA 2.0继续支持热插拔功能,即在系统运行时可以安全地插入或移除硬盘,同时提升了电源管理能力,能够更有效地控制硬盘的功耗和休眠模式。
4. **错误检测和校验**:增强了错误检测和校验功能,提高了数据传输的可靠性,确保了数据的一致性和完整性。
5. **多任务处理能力**:SATA 2.0允许同时进行多个数据传输操作,提高了I/O性能,对于多任务环境下的应用有显著优势。
6. **向下兼容性**:尽管是新版本,但SATA 2.0仍然保持对SATA 1.0设备的兼容性,用户无需更换现有硬件就能享受到速度提升带来的好处。
7. **标准化和开放性**:SATA 2.0规范的发布进一步推动了硬盘接口的标准化进程,促进了不同厂商间产品的互换性和市场接受度。
8. **版权声明**:这个规范提供的是一种无保障的“原样提供”(As Is)资源,不包含任何形式的商业或法律保证,包括适销性、非侵权性和特定用途的适用性。所有作者免除关于使用或实施规范中信息可能侵犯任何专有权的责任,并明确指出提供此规范并不授予任何形式的知识产权许可。
SATA 2.0协议的出现不仅显著提高了硬盘接口的速度和效率,还为现代计算机系统提供了更好的性能基础,对于推动存储技术的发展起到了关键作用。随着技术的进步,SATA 3.0和后续版本进一步强化了这些优点,但SATA 2.0作为基础标准,其影响力至今仍不可忽视。
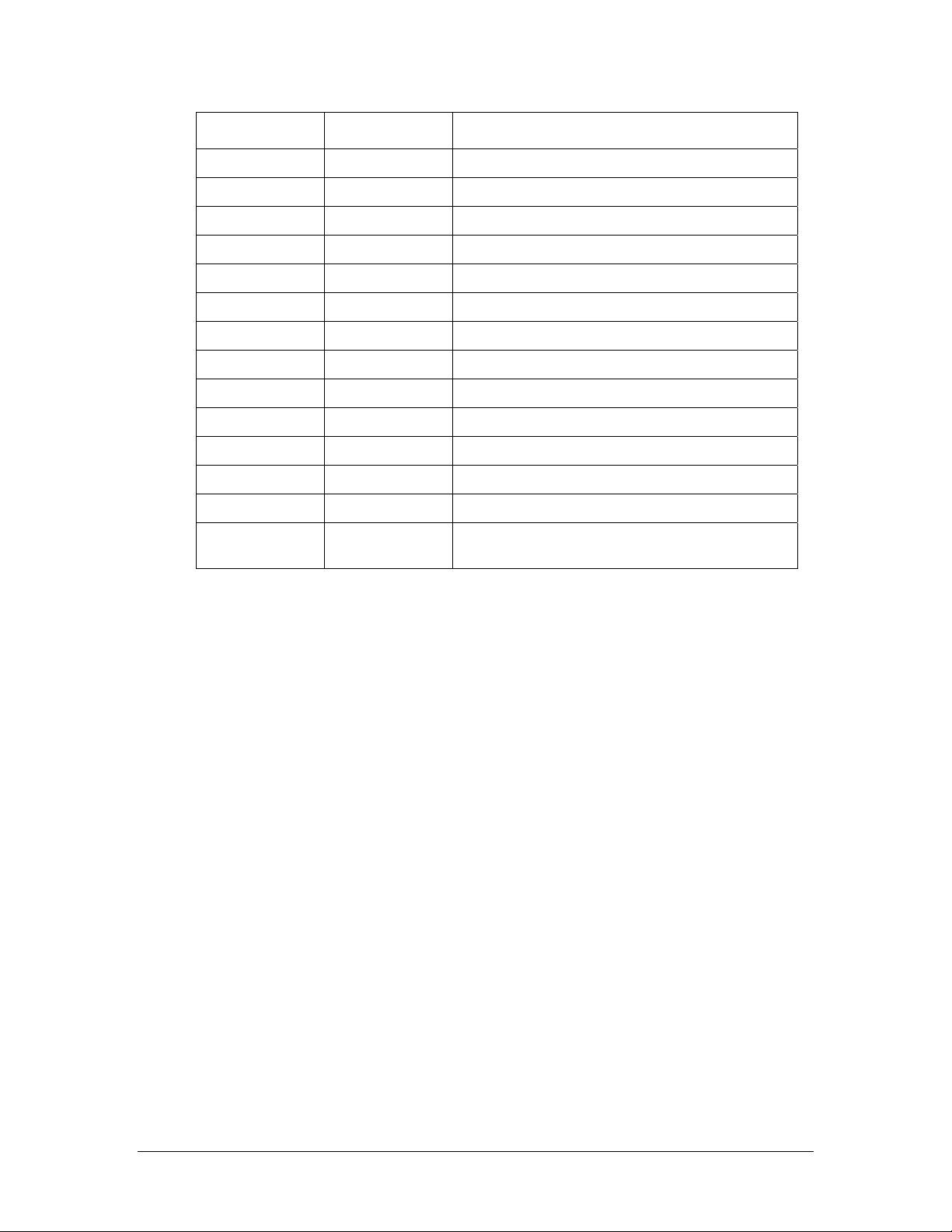
Type field value
(hex)
Assignment
Description
0x27 SATA 1.0
Register FIS – host to device
0x34 SATA 1.0
Register FIS – device to host
0x39 SATA 1.0
DMA Activate FIS – Device to host
0x41 SATA 1.0
DMA Setup FIS – Bi-directional
0x46 SATA 1.0
Data FIS – Bi-directional
0x58 SATA 1.0
BIST Activate FIS – Bi-directional
0x5F SATA 1.0
PIO Setup FIS – Device to host
0xA1 SATA 1.0
Set Device Bits FIS – Device to host
0xA6
Reserved for future Serial ATA definition
0xB8
Reserved for future Serial ATA definition
0xBF
Reserved for future Serial ATA definition
0xC7 SATA II
Vendor unique
0xD4 SATA II
Vendor unique
0xD9 SATA II Reserved for Serial ATA connectivity
expansion definition
Figure 8 FIS type value assignments
9


剩余83页未读,继续阅读
2020-01-23 上传
2017-09-19 上传
点击了解资源详情
2024-11-06 上传
2023-04-30 上传
2012-07-09 上传
2017-03-22 上传

yyuan163
- 粉丝: 3
- 资源: 17
 我的内容管理
展开
我的内容管理
展开







最新资源
- C语言数组操作:高度检查器编程实践
- 基于Swift开发的嘉定单车LBS iOS应用项目解析
- 钗头凤声乐表演的二度创作分析报告
- 分布式数据库特训营全套教程资料
- JavaScript开发者Robert Bindar的博客平台
- MATLAB投影寻踪代码教程及文件解压缩指南
- HTML5拖放实现的RPSLS游戏教程
- HT://Dig引擎接口,Ampoliros开源模块应用
- 全面探测服务器性能与PHP环境的iprober PHP探针v0.024
- 新版提醒应用v2:基于MongoDB的数据存储
- 《我的世界》东方大陆1.12.2材质包深度体验
- Hypercore Promisifier: JavaScript中的回调转换为Promise包装器
- 探索开源项目Artifice:Slyme脚本与技巧游戏
- Matlab机器人学习代码解析与笔记分享
- 查尔默斯大学计算物理作业HP2解析
- GitHub问题管理新工具:GIRA-crx插件介绍
