通用圆柱坐标系搬运机械手设计与应用
版权申诉
103 浏览量
更新于2024-06-21
收藏 738KB DOCX 举报
"搬运机械手的设计概述"
本文主要探讨了通用圆柱坐标系机械手的设计,这是一种在工业生产中广泛应用的自动化设备,旨在模仿人类上肢的功能,以执行工件搬运和工具操作等任务。机械手在提升生产效率、改善劳动条件、减轻工人劳动强度以及在恶劣环境下作业等方面具有显著优势,因此具有广泛的发展前景。
机械手的设计通常包括以下几个关键组成部分:
1. 手爪(End Effector):手爪是机械手与工件直接接触的部分,其设计需要根据待搬运工件的形状和尺寸进行定制,确保能够安全、稳定地抓取和释放工件。它可以是夹持式、吸附式或其他形式,以适应不同物料的特性。
2. 手腕(Wrist):手腕负责调整机械手抓取方向和角度,通常包含多个自由度,以实现多维度的运动。手腕的设计需确保灵活性和稳定性,以适应不同的工作位置和姿态。
3. 手臂(Arm):手臂是连接手爪和基座的主体部分,负责大范围的直线或旋转运动。根据应用需求,手臂可以设计为单关节或多关节,以实现更复杂的运动路径。
4. 液压系统:液压传动是为机械手提供动力的一种常见方式,通过液压缸的伸缩来驱动手臂和手腕的运动。液压系统的设计需要考虑压力控制、速度调节以及稳定性等因素。
5. PLC(可编程逻辑控制器):PLC是控制系统的核心,用于接收传感器输入的信息,处理后控制执行机构的动作。在搬运机械手中,PLC可以精确控制机械手的运动速度和轨迹,以满足生产效率和精度的需求。
在设计过程中,还需要考虑到机械手的负载能力、工作范围、精度要求以及安全性等因素。通过合理的结构设计和液压系统优化,机械手能够在自动化生产线上高效、稳定地运行,降低人工操作的错误率,提高生产效率。
总结来说,搬运机械手的设计是一项综合性的工程,涉及到机械、液压、电气等多个领域的知识。通过不断的创新和技术进步,未来机械手将在更多领域发挥重要作用,推动工业生产的自动化进程。
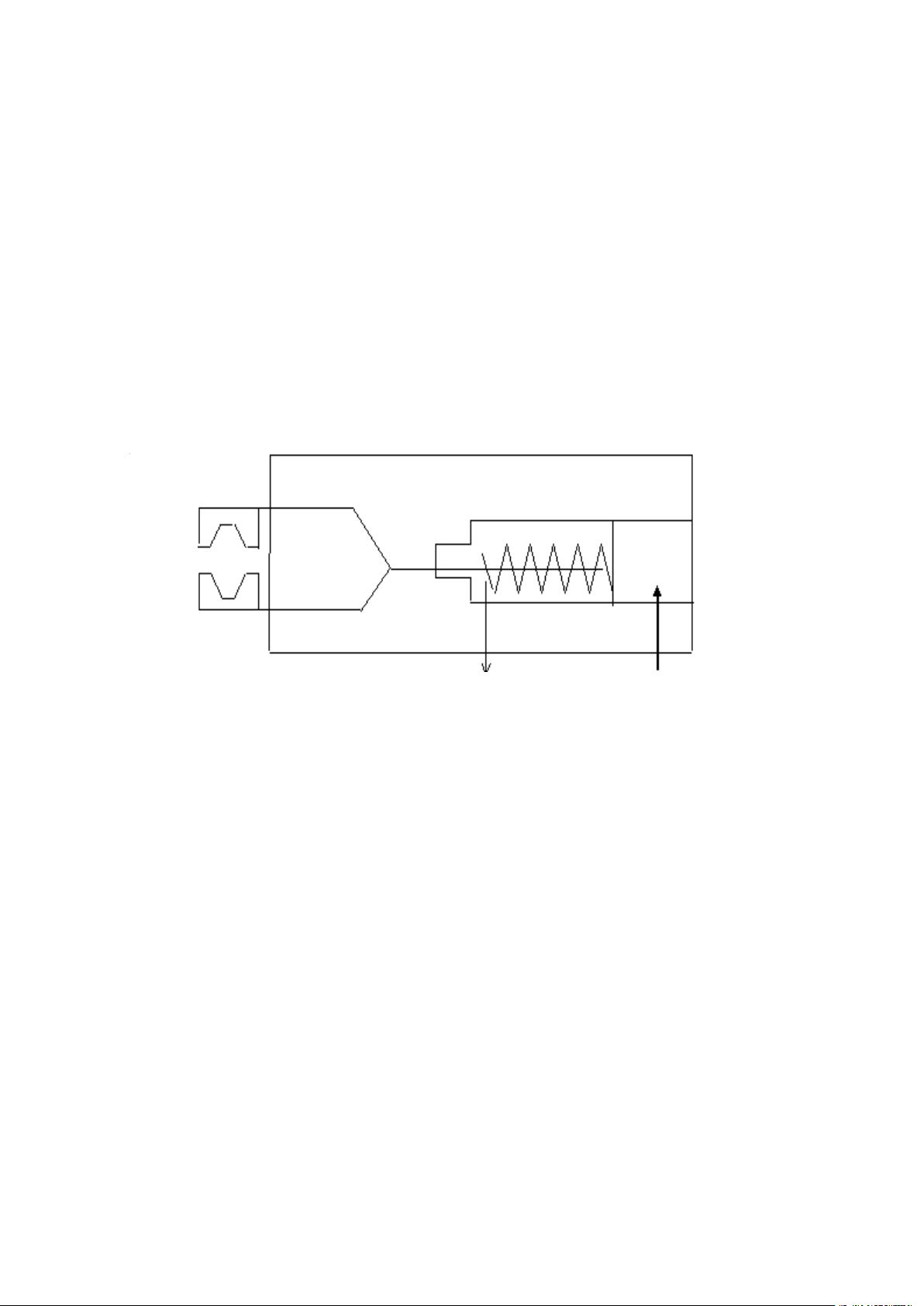
紧方式用常闭史弹簧夹紧,松开时,用单作用式液压缸。此种结构较为简单,制造方便。
2.1.2 拉紧装置原理
如图 2.3 所示:油缸右腔停止进油时,弹簧力向右工件,油缸右腔进油时松开工件。
当油缸的右腔停止进油时,弹簧收到向右的力,使与弹簧相连的手部受到向右的拉力,
从而使手爪合拢。当油腔的右腔进油时,弹簧受到向左的压力,使与弹簧相连的手爪向外伸
出,从而放松工件。
左出油口 右进油口
图 2.2 缸示意简图
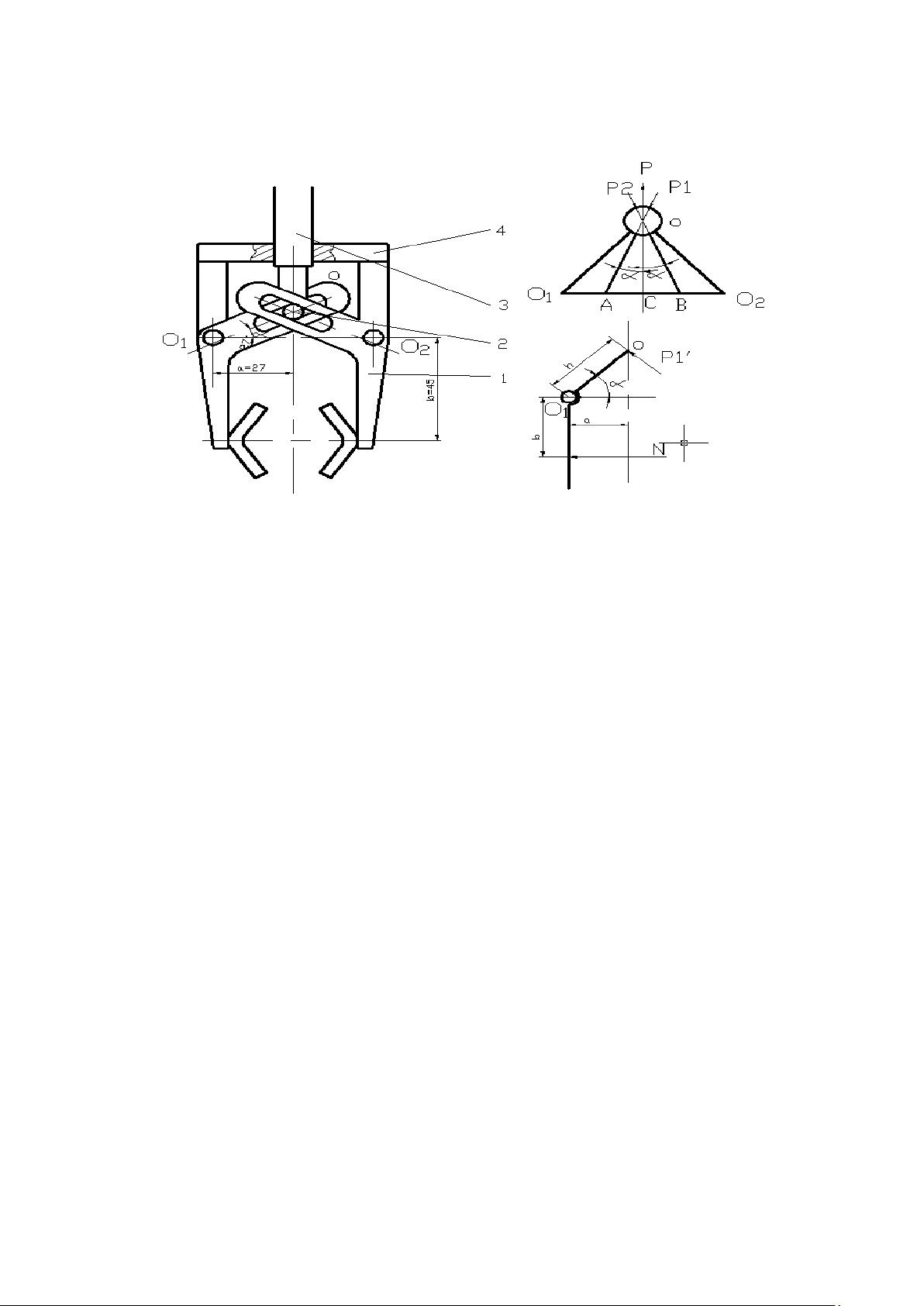
2.1.3 手部驱动力的计算
剩余48页未读,继续阅读
点击了解资源详情
2023-06-10 上传
2023-02-24 上传
2023-05-30 上传
2023-05-31 上传
2023-05-31 上传

南抖北快东卫
- 粉丝: 74
- 资源: 5588
 我的内容管理
展开
我的内容管理
展开







最新资源
- 解决Eclipse配置与导入Java工程常见问题
- 真空发生器:工作原理与抽吸性能分析
- 爱立信RBS6201开站流程详解
- 电脑开机声音解析:故障诊断指南
- JAVA实现贪吃蛇游戏
- 模糊神经网络实现与自学习能力探索
- PID型模糊神经网络控制器设计与学习算法
- 模糊神经网络在自适应PID控制器中的应用
- C++实现的学生成绩管理系统设计
- 802.1D STP 实现与优化:二层交换机中的生成树协议
- 解决Windows无法完成SD卡格式化的九种方法
- 软件测试方法:Beta与Alpha测试详解
- 软件测试周期详解:从需求分析到维护测试
- CMMI模型详解:软件企业能力提升的关键
- 移动Web开发框架选择:jQueryMobile、jQTouch、SenchaTouch对比
- Java程序设计试题与复习指南
