Apollo行为轨迹预测技术在自动驾驶中的应用
需积分: 11 94 浏览量
更新于2024-08-05
收藏 2.78MB PDF 举报
"Apollo公开课详细介绍了Apollo行为轨迹预测技术,主要关注无人车周围障碍物的未来轨迹预测,该技术在自动驾驶系统中起着关键的承上启下作用,连接感知、定位、高精地图等上游模块与规划模块,为无人车路径规划提供依据。预测时需考虑不同障碍物类型(如机动车和行人)的行为特征,并根据障碍物自身及周围环境的静态和动态信息提取特征。此外,还需结合实际算力选择合适的预测算法。课程详细讲述了机动车和行人的轨迹预测方法,强调了车辆动力学、地理信息和交通规则在预测中的重要性。"
在机动车行为轨迹预测方面,首先要理解其行为特征,包括动力学限制、地理信息依赖和不同路况下的行为差异。预测模型通常首先预测车辆意图,然后基于运动学原理生成未来轨迹。在常规道路上,模型的输入包括障碍车的历史运动状态和车道中心线信息,通过编码器对历史轨迹进行处理,利用RNN模型捕捉连续性,再对每个车道进行编码。接着,使用多层感知机(MLP)处理车道编码,通过全局池化整合所有车道信息,最终将每个车道的意图转换为概率分布,给出障碍车选择不同车道的概率。
对于行人行为轨迹预测,行人通常表现出更加随机和不可预测的行为,可能受个人习惯、社交交互和环境因素影响。预测行人轨迹可能需要更复杂的模型,如社会力模型或深度学习模型,以捕捉个体间的互动和社会规范。这类模型会考虑行人的速度、方向、身体姿态,以及与其他行人的相对位置等信息,从而预测未来可能的行走路径。
Apollo的行为轨迹预测技术是通过理解并模拟不同障碍物的行为模式,结合环境信息,以科学和智能的方式预测未来轨迹,确保无人车在复杂交通环境中的安全行驶。这一技术的应用对于自动驾驶系统的决策制定至关重要,也是提升自动驾驶车辆安全性和效率的关键所在。
Apollo公开课丨Apollo行为轨迹预测技术
行为轨迹预测是对无人车周围的障碍物未来n秒的行为轨迹进行预测。在整个自动驾驶系统中,它是
一个承上启下的模块,上面的是原始的输入 信息,像感知、定位、高精地图。下面是规划模块,把动
态的预测数据给规划模块,指导无人车路径、速度方面的规划。
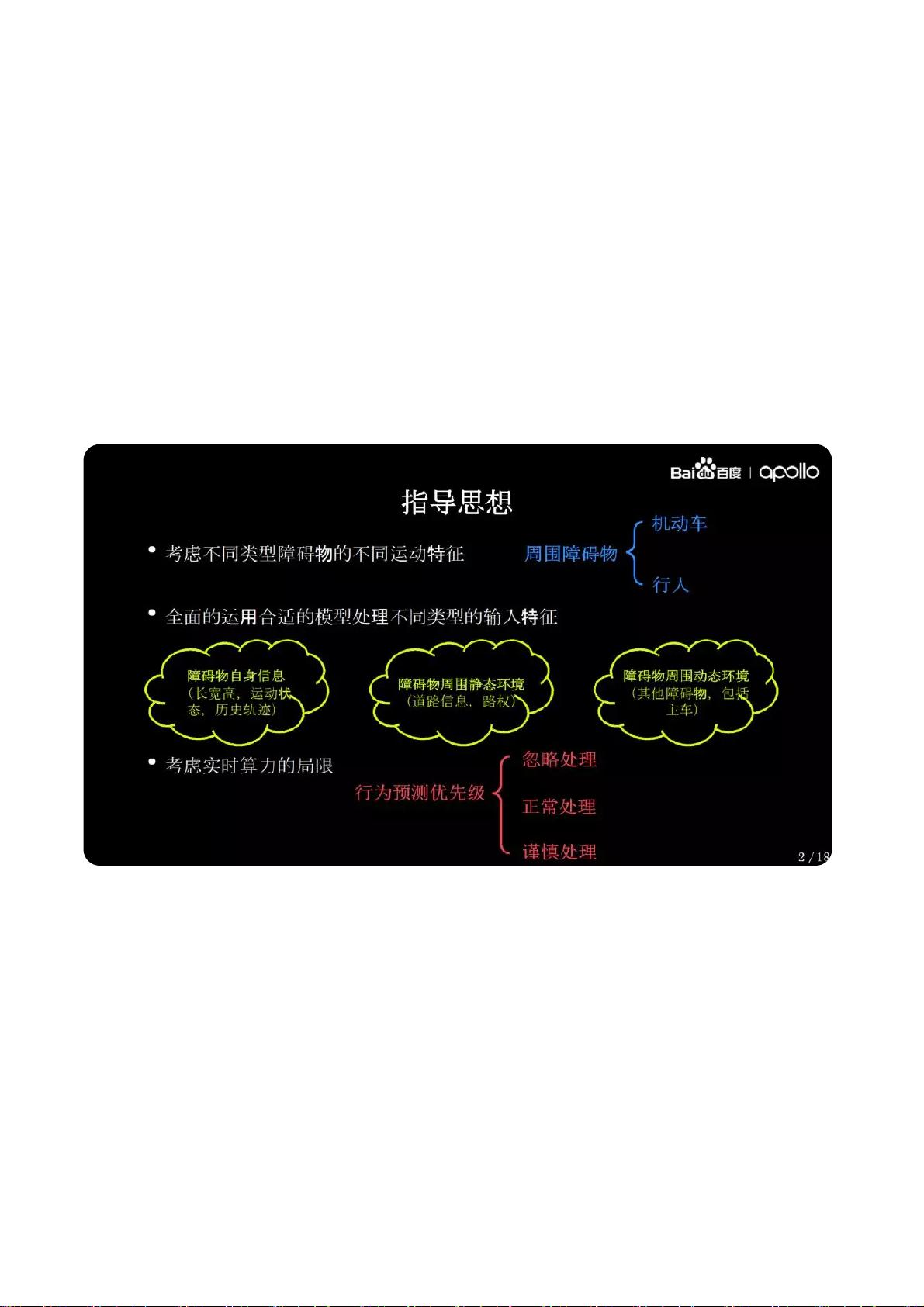
在做行为轨迹预测的时候,有几点需要注意。首先是预测一个物体未来轨迹的时候,要考虑物体不同
的特征,比如说周围的障碍物分为两类,一类是机动车障 碍物,另一类是行人障碍物,它们有不同行
为特征,要用不同的模型分别预测各自的轨迹。
▲指导思想
其次,因为预测模块用了很多模型或者机器 学习,对于不同类型的输入需要选择比较合适的模型分别
提取特征。比如说对于障碍物自身,要提取包括形状、长、宽、高以及感知到的历史运动状态。对于
障碍物周围静态环境,要提取道路信息、路 权等特征。对于障碍物周围动态环境,要把其它障碍物的
信息提取出来。
最后是应用和算力上的考量,我们要结合实际的算力采用合适的算法,这就需要对预测做优先级的划
分。
下面分别介绍机动车和行人轨迹预测方 法。
下载后可阅读完整内容,剩余9页未读,立即下载
2022-04-17 上传
2022-04-17 上传
2022-04-17 上传
2022-04-17 上传
2022-04-17 上传
2022-04-17 上传
2022-04-17 上传
2022-04-17 上传

疯狂的机器人
- 粉丝: 9032
- 资源: 152
 我的内容管理
展开
我的内容管理
展开







最新资源
- Fisher Iris Setosa数据的主成分分析及可视化- Matlab实现
- 深入理解JavaScript类与面向对象编程
- Argspect-0.0.1版本Python包发布与使用说明
- OpenNetAdmin v09.07.15 PHP项目源码下载
- 掌握Node.js: 构建高性能Web服务器与应用程序
- Matlab矢量绘图工具:polarG函数使用详解
- 实现Vue.js中PDF文件的签名显示功能
- 开源项目PSPSolver:资源约束调度问题求解器库
- 探索vwru系统:大众的虚拟现实招聘平台
- 深入理解cJSON:案例与源文件解析
- 多边形扩展算法在MATLAB中的应用与实现
- 用React类组件创建迷你待办事项列表指南
- Python库setuptools-58.5.3助力高效开发
- fmfiles工具:在MATLAB中查找丢失文件并列出错误
- 老枪二级域名系统PHP源码简易版发布
- 探索DOSGUI开源库:C/C++图形界面开发新篇章
