"这篇资料是浙江大学刘勇教授关于地面无人平台中的SLAM技术的讲解,涵盖了SLAM技术的背景、理论与方法、常用的开源系统与算法,以及对未来的总结与展望。SLAM(Simultaneous Localization And Mapping)是让机器人在未知环境中自我定位并构建地图的关键技术,广泛应用于机器人、无人机、自动驾驶汽车等领域。教程还提到了SLAM的历史发展,包括经典时期、算法分析时期和鲁棒感知时期,并推荐了相关文献供深入学习。"
正文:
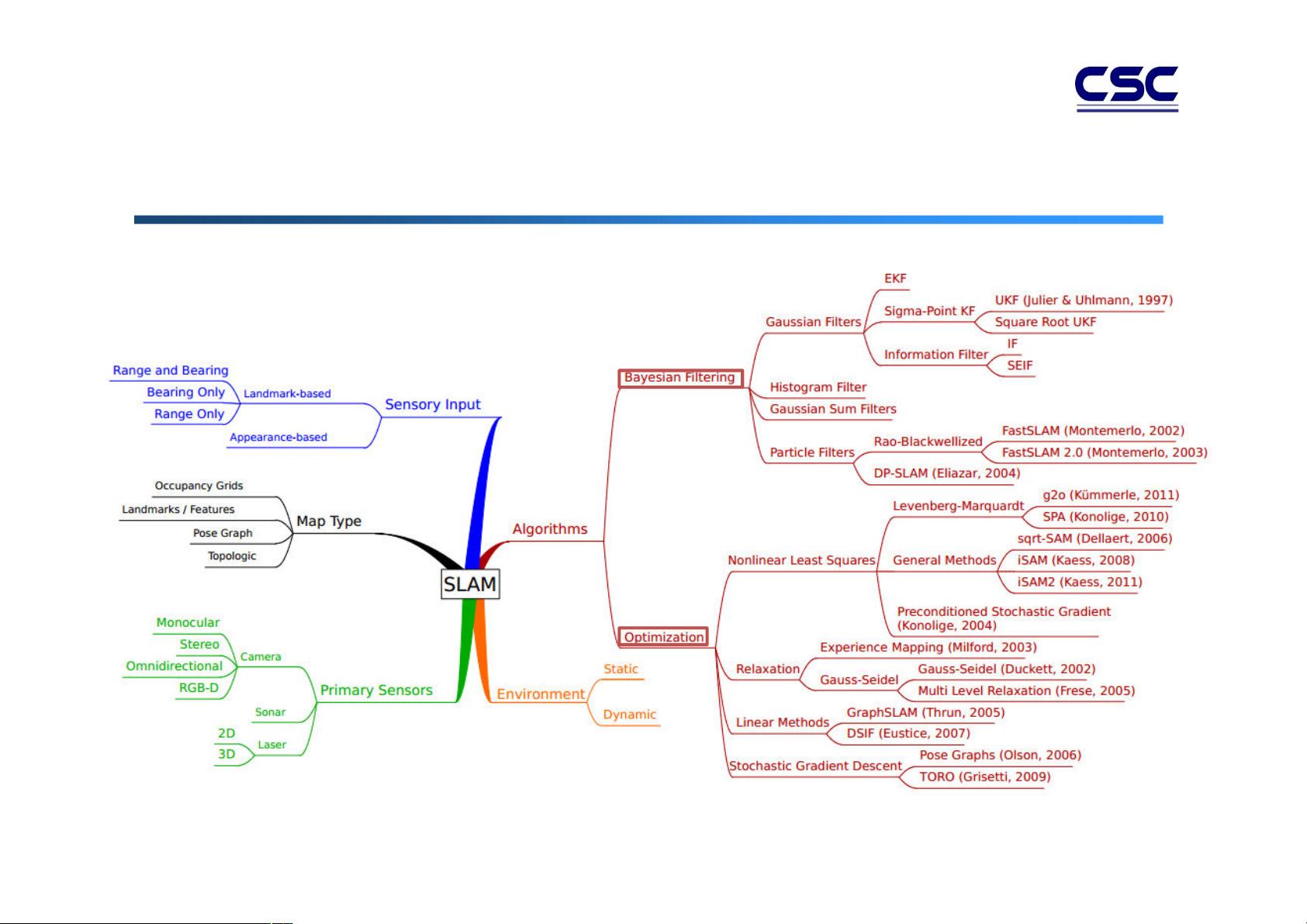
SLAM技术是机器人自主导航的基础,它允许设备在未知环境中移动时不断更新其位置估计并创建环境的增量式地图。这个过程涉及传感器数据的融合,如激光雷达、摄像头或IMU,以解决“我在哪里”和“周围是什么”的问题。SLAM的目标是在最小化定位误差的同时构建地图,这在各种应用中都是至关重要的,如精确的机器人导航、自动驾驶汽车的安全行驶,以及增强现实/虚拟现实体验的无缝集成。
刘勇教授的讲解中提到了SLAM技术的三个主要发展阶段:经典时期(1986-2004),这个阶段侧重于概率方法,如扩展卡尔曼滤波器(EKF)、随机贝叶斯滤波器(RBPF)和最大似然估计(MLE),以及数据关联问题;算法分析时期(2004-2015),这一阶段重点研究了SLAM的可观性、收敛性、一致性和稀疏性,同时也催生了许多开源SLAM系统;最后是鲁棒感知时期(2015至今),这个阶段强调了在复杂环境下的鲁棒性、高级感知能力和自适应能力。
ORB-SLAM是一个被广泛引用的例子,它是一种基于特征的单目、双目和RGB-D SLAM系统,能够处理大规模的室内和室外场景。而宽区域室内和室外实时3D SLAM则关注于在大范围内实现高精度的3D建图和定位。这些系统和算法的发展极大地推动了SLAM技术的进步。
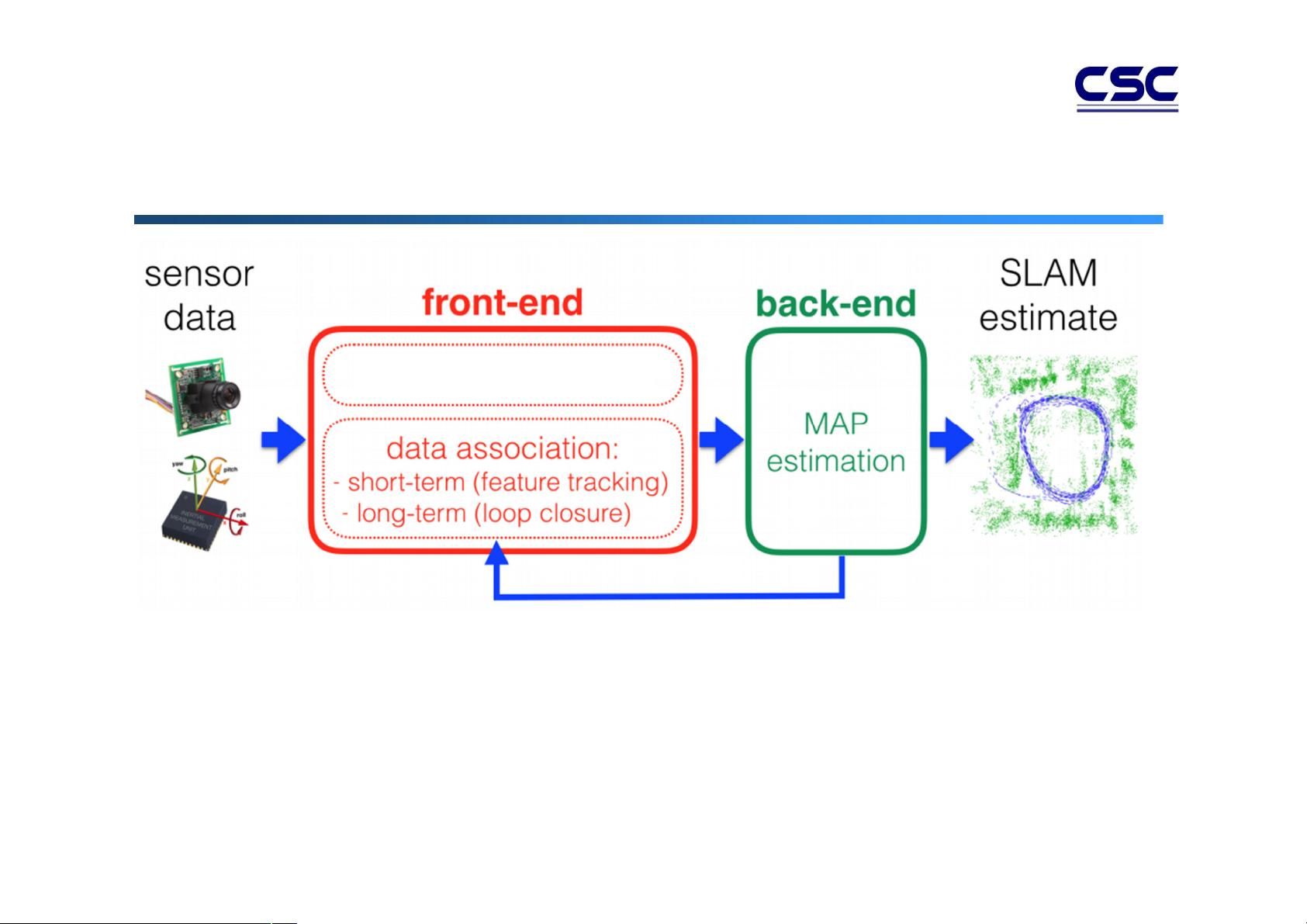
地图构建与定位是SLAM的核心任务,机器人在未知环境中移动,通过传感器获取的数据来估计自身的运动轨迹,并逐步构建环境模型。这一过程中需要解决的主要挑战包括数据关联、传感器噪声处理、特征提取与匹配,以及实时性要求。
刘勇教授的教程还推荐了一些SLAM领域的经典文献,如Durrant-Whyte和Bailey的两篇论文,它们详细阐述了SLAM的基本原理和最新进展。通过深入阅读这些文献,可以进一步理解SLAM的理论基础及其在实际应用中的挑战。
SLAM技术在地面无人平台上起着至关重要的作用,它的研究和应用不仅推动了机器人技术的发展,也对自动驾驶、无人机导航和其他相关领域产生了深远影响。随着技术的不断进步,SLAM将会更加成熟,为未来的智能系统提供更强大、更可靠的定位和地图构建能力。


 我的内容管理
展开
我的内容管理
展开









