ISO 22900-2: 汽车诊断通信协议详解
"ISO 22900-2是国际标准化组织(ISO)制定的一份汽车行业标准,全称为“道路车辆—模块化车辆通信接口(MVCI)—第2部分:诊断协议数据单元应用程序编程接口(D-PDU API)”。这份标准主要关注汽车电子系统中的诊断通信协议,旨在促进不同制造商之间的兼容性和互操作性。
ISO 22900-2标准的首次发布日期为2009年2月1日,它定义了车辆诊断过程中数据单元之间的通信规范。这个规范涵盖了诊断协议数据单元(D-PDU)的应用程序编程接口(API),API是软件开发人员用来创建与车辆诊断系统交互的软件工具的关键部分。通过D-PDU API,开发者可以构建能够识别和处理各种车辆诊断信息的软件,如故障代码读取、车辆状态监控、性能参数调整等。
标准的适用范围不仅限于车辆本身,还涵盖了与车辆通信的外部设备,如诊断工具、检测站设备、服务中心的电脑系统等。ISO 22900-2确保了这些设备在与各种车型交互时,能遵循统一的通信规则,从而提高服务效率,降低维护成本,并确保用户安全。
在技术层面上,ISO 22900-2可能涉及以下内容:
1. **诊断消息格式**:定义了诊断请求和响应的数据结构,包括数据包的编码、解码规则以及错误处理机制。
2. **通信协议栈**:描述了从物理层到应用层的通信协议,如CAN(Controller Area Network)、LIN(Local Interconnect Network)或以太网等。
3. **服务定义**:明确了诊断服务的种类和功能,如读取故障码、清除故障码、执行控制单元测试等。
4. **安全性**:规定了诊断过程中数据保护和隐私保护的相关措施,防止非法访问或篡改车辆数据。
5. **兼容性**:规定了接口的兼容性要求,使得新的诊断工具能够无缝地与旧车型和新车型进行通信。
此外,该标准可能还涉及到如何测试和验证符合ISO 22900-2的设备,以及如何更新和维护标准以适应技术发展。对于汽车行业从业者来说,理解和应用这个标准对于提升产品的质量和服务水平至关重要。"
请注意,由于提供的文件内容有限,以上概述基于对ISO 22900-2标准的广泛理解进行编写,具体标准文档可能包含更多详细信息和特定技术要求。欲了解完整内容,建议直接查阅官方发布的ISO 22900-2标准文档。

ISO 22900-2:2009(E)
8
© ISO 2009 – All rights reserved
8 D-PDU API use cases
8.1 Overview
The MVCI protocol module is the key component to exchange implementations of diagnostic protocols among
OEMs and tool suppliers without re-engineering already implemented software. By relying on the D-PDU API,
the application may easily access other or additional MVCI protocol module implementations. In a similar way
to existing standards like SAE J2534-1 and RP1210a, applications compliant to the MVCI standard are
basically independent of the underlying device as long as the required physical interface is supported and no
tool supplier specific feature is required.
Even though the D-PDU API extends the capabilities beyond the definitions of SAE J2534-1 and RP1210a,
the existing standards and their related devices and applications do not become obsolete by introducing the
D-PDU API. Instead, the transition and co-existence of all standards are facilitated to save development and
investment costs. The definition of the D-PDU API is closely related to SAE J2534-1 and RP1210a to allow
mapping of functionality in both directions. However, it extends their definitions to cover the full width of
enhanced diagnostics.
The fulfilment of the following use cases is crucial for the inter-exchange of protocol module implementations
according to MVCI, SAE J2534-1 and RP1210a.
NOTE In the use case figures below, the grey boxes suggest a specific software component architecture. This
representation is not intended to be construed as the only possible architectural solution. Depending on the situation, there
can be more software components, or fewer software components.
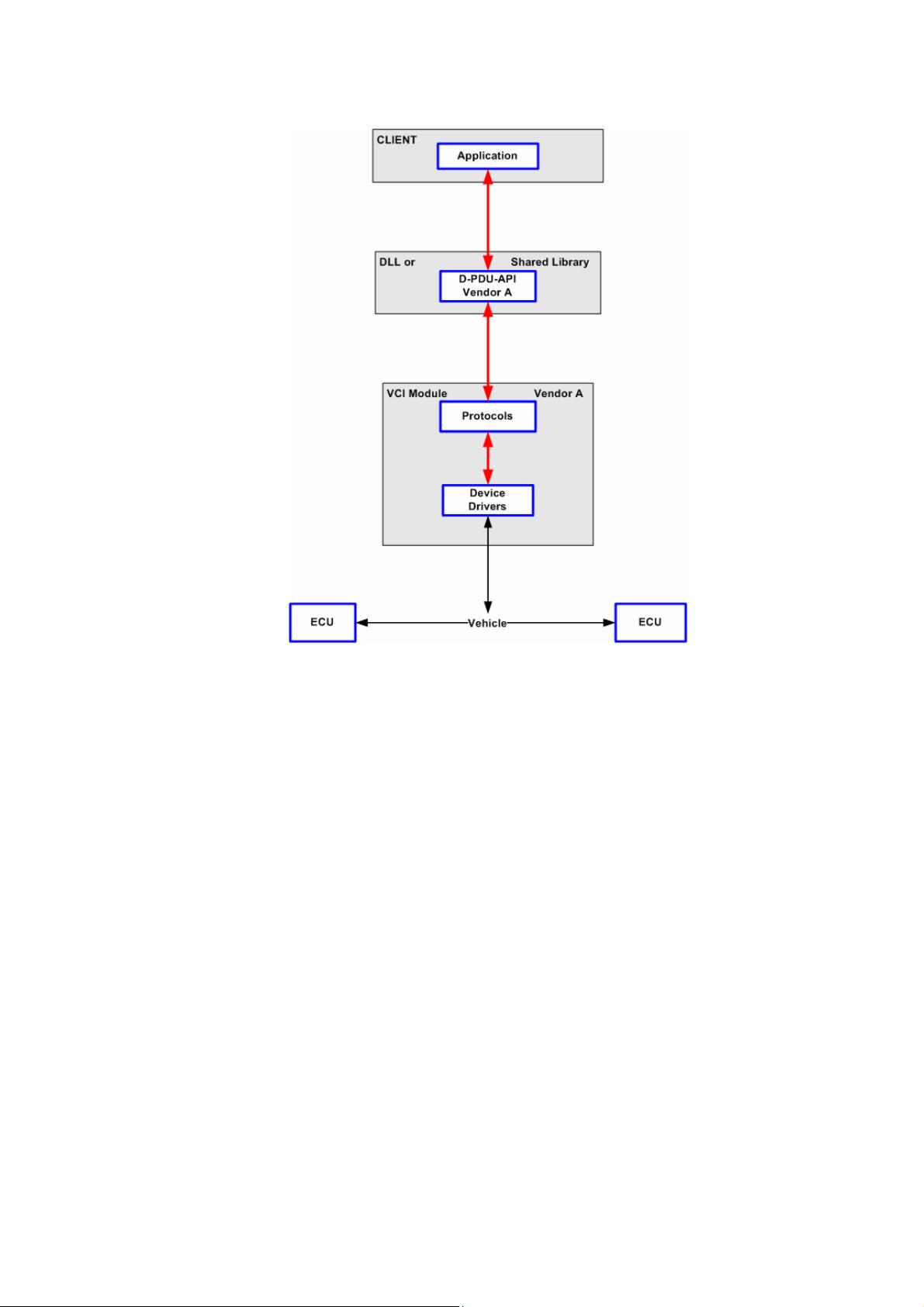
8.2 Use case 1: Single MVCI protocol module
The single MVCI protocol module configuration (see Figure 4 — MVCI configuration with single MVCI protocol
module) is the simplest configuration where the D-PDU API implementation and the MVCI protocol module
hardware are obtained from the same vendor. The application will access the single MVCI protocol module
through a single D-PDU API. Parallel access onto multiple D-PDU APIs is not required. Resource handling is
completely covered inside the D-PDU API implementation.
This use case applies to basically all stand-alone MVCI protocol module device configurations.

剩余333页未读,继续阅读
2022-08-25 上传
2023-07-27 上传
2023-11-29 上传
2023-05-11 上传
2023-04-29 上传
2023-09-12 上传
2023-10-10 上传

etc9527
- 粉丝: 479
- 资源: 16
 我的内容管理
展开
我的内容管理
展开







最新资源
- 掌握JSON:开源项目解读与使用
- Ruby嵌入V8:在Ruby中直接运行JavaScript代码
- ThinkErcise: 20项大脑训练练习增强记忆与专注力
- 深入解析COVID-19疫情对HTML领域的影响
- 实时体育更新管理应用程序:livegame
- APPRADIO PRO:跨平台内容创作的CRX插件
- Spring Boot数据库集成与用户代理分析工具
- DNIF简易安装程序快速入门指南
- ActiveMQ AMQP客户端库版本1.8.1功能与测试
- 基于UVM 1.1的I2C Wishbone主设备实现指南
- Node.js + Express + MySQL项目教程:测试数据库连接
- tumbasUpk在线商店应用的UPK技术与汉港打码机结合
- 掌握可控金字塔分解与STSIM图像指标技术
- 浏览器插件:QR码与短链接即时转换工具
- Vercel部署GraphQL服务的实践指南
- 使用jsInclude动态加载JavaScript文件的方法与实践
