模型预测控制(MPC)原理与应用
需积分: 0 37 浏览量
更新于2024-07-18
收藏 2.23MB PDF 举报
"MPC(模型预测控制)是控制工程领域的一个重要主题,自其诞生以来就持续受到工业界和学术界的关注。该方法因其四个关键特性而对实践者和学者都具有吸引力:模型预测、优化问题求解、考虑约束以及可实现积分动作。本教学材料由Bo Bernhardsson和Karl Johan Åström编写,涵盖了MPC的基本概念、问题设置、参数、工具以及实际应用示例,如四连罐系统,并提到了显式MPC和CVXGEN工具。参考文献包括Rawlings的《模型预测控制教程概述》和Åkesson的《MPC工具1.0手册》。"
正文:
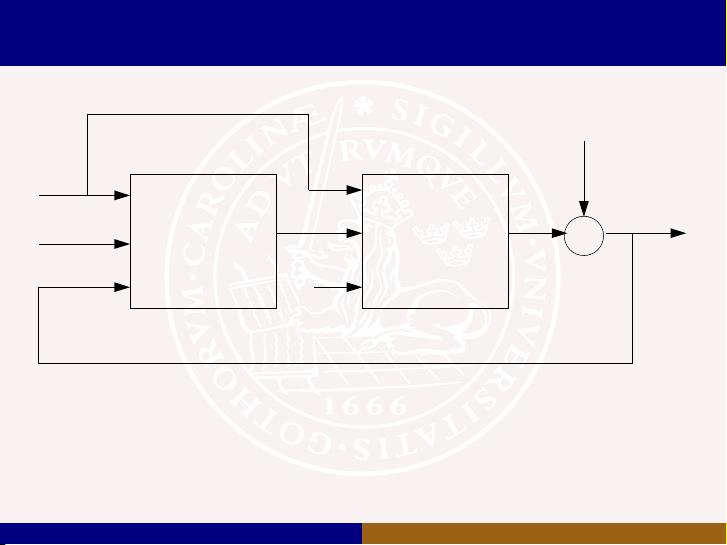
MPC,即模型预测控制,是一种先进的控制策略,它基于对未来过程行为的预测模型来制定控制决策。这一策略的核心思想是递归的预测和控制,也就是所谓的滚动优化或递归优化。在每个时间步k,控制器会解决一个预定义时域内的开环最优控制问题,然后仅实施第一个控制输入。当时间推进到k+1时,这个过程会重复,上一时刻的最优解可以作为新的初始猜测,这是贝尔曼的最优性原理的应用。
MPC的主要特点在于它利用模型明确地预测系统未来的行为,并且在设计时考虑到输入、输出和状态的约束。通过解决一个通常为凸优化问题,MPC能够找到一个满足这些约束的控制序列。这种控制策略的灵活性使得它能处理非线性系统、多变量系统以及有约束条件的控制问题,使其在化工、能源、汽车等领域有着广泛的应用。
在MPC问题的设置中,通常需要定义预测时间窗口(预测期)、控制周期、优化目标(如最小化某个性能指标)以及系统模型。系统模型可以是线性的,也可以是基于状态空间方程的非线性模型。优化问题通常包括成本函数和约束条件,例如,确保控制输入不超过特定范围,保持系统的稳定性,或者达到期望的动态性能。
MPC工具,如提到的CVXGEN,是用来帮助解决优化问题的软件工具。CVXGEN能够生成针对特定问题的高效的C代码,从而加速优化问题的求解,这对于实时应用至关重要。此外,显式MPC是一种预计算控制律的方法,它可以提前计算出一系列可能的控制输入,这样在实际运行时就可以快速选择并应用最合适的输入,而无需在每个时间步进行完整的优化计算。
以四连罐系统为例,这是一个常用于MPC教学的经典问题,因为它包含了多个相互耦合的动态过程。通过应用MPC,可以有效地平衡各个罐中的液位,同时满足各种操作限制,如防止溢出或空罐。
MPC是一种强大的控制策略,它结合了模型预测、优化和约束处理,能够为复杂系统的控制提供灵活而有效的解决方案。随着计算能力的增强和优化算法的进步,MPC在未来将继续发挥重要作用,推动自动化和控制领域的技术创新。
2009-11-27 上传
2018-05-02 上传
175 浏览量
2023-06-07 上传
2019-01-28 上传
2018-01-20 上传
2019-07-09 上传
2018-05-10 上传
2018-09-25 上传
点击了解资源详情

a477680113
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- 深入了解Django框架:Python中的网站开发利器
- Spring Boot集成框架示例:深入理解与实践
- 52pojie.cn捷速OCR文字识别工具实用评测
- Unity实现动态水体涟漪效果教程
- Vue.js项目实践:饭否每日精选日历Web版开发记
- Bootbox:用Bootstrap实现JavaScript对话框新体验
- AlarStudios:Swift开发教程及资源分享
- 《火影忍者》主题新标签页壁纸:每日更新与自定义天气
- 海康视频H5player简易演示教程
- -roll20脚本开发指南:探索roll20-master包-
- Xfce ClassicLooks复古主题更新,统一Linux/FreeBSD外观
- 自建物理引擎学习刚体动力学模拟
- Python小波变换工具包pywt的使用与实例
- 批发网导航程序:自定义模板与分类标签
- 创建交互式钢琴键效果的JavaScript库
- AndroidSunat应用开发技术栈及推介会议
