【Advanced Edition】MATLAB Model Predictive Toolbox: Model Predictive Control Toolbox User Guide
发布时间: 2024-09-13 16:38:06 阅读量: 8 订阅数: 26 
# **Advanced篇** MATLAB Model Predictive Control Toolbox: A User Guide
MATLAB Model Predictive Control (MPC) Toolbox is a powerful tool for designing, simulating, and deploying MPC controllers. It offers a range of functionalities, including:
- **Model Establishment and Verification:** The toolbox supports various model types, including state-space models, output-error models, and nonlinear models. It provides tools for model identification, verification, and fitting.
- **Controller Design and Parameter Optimization:** The toolbox offers a series of optimization algorithms for designing MPC controllers. It allows users to specify objective functions, constraints, and weights, and optimize controller parameters for optimal performance.
- **Simulation and Deployment:** The toolbox provides a simulation environment for testing and validating MPC controllers. It also supports the deployment of controllers to embedded systems or cloud platforms.
# 2. Theoretical Foundation of Model Predictive Control
### 2.1 Fundamental Principles of Model Predictive Control
Model Predictive Control (MPC) is an advanced control technique that controls dynamic systems by predicting future system behavior and optimizing control inputs. The basic principles of MPC are as follows:
1. **Establishing the System Model:** First, a model that accurately describes the dynamic behavior of the system needs to be established. This model can be a state-space model, an output-error model, or another suitable model.
2. **Predicting Future States:** Using the system model, MPC predicts the future states of the system over a period of time, typically the prediction horizon (H) number of sampling times.
3. **Optimizing Control Inputs:** Based on the predicted future states, MPC optimizes control inputs to minimize an objective function, such as tracking a reference trajectory or minimizing system error.
4. **Implementing Control Inputs:** The optimized control inputs are applied to the system to perform actual control.
5. **Updating the Model and Predictions:** As new data is acquired, the system model and predictions are continuously updated to improve control performance.
### 2.2 Mathematical Models of Model Predictive Control
The mathematical models of MPC typically take one of the following two forms:
#### 2.2.1 State-Space Model
The state-space model describes the relationship between the state variables (x) and the output variables (y) of the system, as shown below:
```
x[k+1] = A*x[k] + B*u[k]
y[k] = C*x[k] + D*u[k]
```
Where:
* x[k]: System state vector
* u[k]: Control input vector
* y[k]: System output vector
* A, B, C, D: System matrices
#### 2.2.2 Output Error Model
The output error model describes the relationship between the system's output error (e[k]) and past inputs and outputs, as shown below:
```
e[k] = y[k] - r[k]
A(z)*e[k] = B(z)*Δu[k] + C(z)*ε[k]
```
Where:
* e[k]: System output error
* r[k]: Reference trajectory
* Δu[k]: Control input increment
* ε[k]: Process noise
* A(z), B(z), C(z): Polynomial matrices
### 2.3 Optimization Algorithms ***
***mon optimization algorithms include:
***Linear Programming (LP):** Used for Linear Model Predictive Control (LMPC)
***Quadratic Programming (QP):** Used for Quadratic Model Predictive Control (QMPC)
***Nonlinear Programming (NLP):** Used for Nonlinear Model Predictive Control (NMPC)
The objective function of the optimization problem is typically a quadratic function, measuring the trade-off between system output error and control input. Constraints include limits on state variables, control inputs, and outputs.
# 3.1 Design of Model Predictive Controllers
#### 3.1.1 Model Establishment and Verification
**Model Establishment**
Model establishment is a key step in model predictive control and requires selecting an appropriate model structure based on the characteristics of the controlled object and the control objectives. The MATLAB MPC Toolbox provides various model establishment methods, including:
- **State-Space Model:** Describes the dynamic relationship between system states and outputs.
- **Output Error Model:** Describes the error dynamics between system output and reference input.
- **Transfer Function Model:** Describes the frequency response relationship between system input and output.
**Model Verif

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏目录
最低0.47元/天 解锁专栏
送3个月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
Python列表的函数式编程之旅:map和filter让代码更优雅
# 1. 函数式编程简介与Python列表基础
## 1.1 函数式编程概述
函数式编程(Functional Programming,FP)是一种编程范式,其主要思想是使用纯函数来构建软件。纯函数是指在相同的输入下总是返回相同输出的函数,并且没有引起任何可观察的副作用。与命令式编程(如C/C++和Java)不同,函数式编程
Python索引的局限性:当索引不再提高效率时的应对策略

# 1. Python索引的基础知识
在编程世界中,索引是一个至关重要的概念,特别是在处理数组、列表或任何可索引数据结构时。Python中的索引也不例外,它允许我们访问序列中的单个元素、切片、子序列以及其他数据项。理解索引的基础知识,对于编写高效的Python代码至关重要。
## 理解索引的概念
Python中的索引从0开始计数。这意味着列表中的第一个元素
Python在语音识别中的应用:构建能听懂人类的AI系统的终极指南

# 1. 语音识别与Python概述
在当今飞速发展的信息技术时代,语音识别技术的应用范围越来越广,它已经成为人工智能领域里一个重要的研究方向。Python作为一门广泛应用于数据科学和机器学习的编程语言,因其简洁的语法和强大的库支持,在语音识别系统开发中扮演了重要角色。本章将对语音识别的概念进行简要介绍,并探讨Python在语音识别中的应用和优势。
语音识别技术本质上是计算机系统通过算法将人类的语音信号转换
【持久化存储】:将内存中的Python字典保存到磁盘的技巧

# 1. 内存与磁盘存储的基本概念
在深入探讨如何使用Python进行数据持久化之前,我们必须先了解内存和磁盘存储的基本概念。计算机系统中的内存指的
索引与数据结构选择:如何根据需求选择最佳的Python数据结构
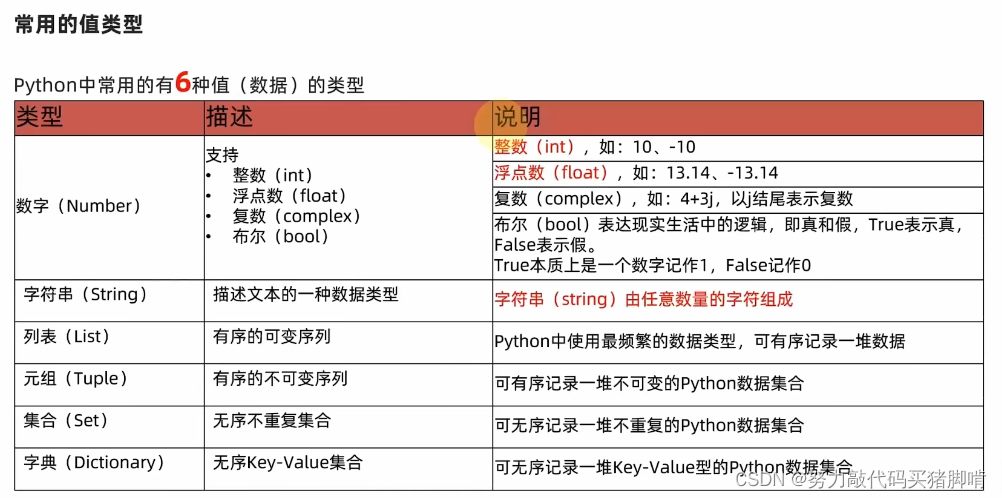
# 1. Python数据结构概述
Python是一种广泛使用的高级编程语言,以其简洁的语法和强大的数据处理能力著称。在进行数据处理、算法设计和软件开发之前,了解Python的核心数据结构是非常必要的。本章将对Python中的数据结构进行一个概览式的介绍,包括基本数据类型、集合类型以及一些高级数据结构。读者通过本章的学习,能够掌握Python数据结构的基本概念,并为进一步深入学习奠
【Python调试技巧】:使用字符串进行有效的调试
# 1. Python字符串与调试的关系
在开发过程中,Python字符串不仅是数据和信息展示的基本方式,还与代码调试紧密相关。调试通常需要从程序运行中提取有用信息,而字符串是这些信息的主要载体。良好的字符串使用习惯能够帮助开发者快速定位问题所在,优化日志记录,并在异常处理时提供清晰的反馈。这一章将探讨Python字符串与调试之间的关系,并展示如何有效地利用字符串进行代码调试。
# 2. P
Python测试驱动开发(TDD)实战指南:编写健壮代码的艺术
# 1. 测试驱动开发(TDD)简介
测试驱动开发(TDD)是一种软件开发实践,它指导开发人员首先编写失败的测试用例,然后编写代码使其通过,最后进行重构以提高代码质量。TDD的核心是反复进行非常短的开发周期,称为“红绿重构”循环。在这一过程中,"红"代表测试失败,"绿"代表测试通过,而"重构"则是在测试通过后,提升代码质量和设计的阶段。TDD能有效确保软件质量,促进设计的清晰度,以及提高开发效率。尽管它增加了开发初期的工作量,但长远来
Python类型转换与检查:确保安全转换的5大策略
# 1. Python类型转换与检查概述
Python作为一种动态类型语言,它的类型转换和检查机制是编写高效、健壮代码的关键。在这一章节中,我们将对类型转换与检查的基本概念进行概述,并强调它们在程序设计中的重要性。
## Python类型转换与检查的重要性
类型转换是将数据从一种类型转换为另一种类型的过程。这在Python中是常见的,因为它需要在不同类型间进行运算或操作。而类型检查则确保数据在
Python并发控制:在多线程环境中避免竞态条件的策略

# 1. Python并发控制的理论基础
在现代软件开发中,处理并发任务已成为设计高效应用程序的关键因素。Python语言因其简洁易读的语法和强大的库支持,在并发编程领域也表现出色。本章节将为读者介绍并发控制的理论基础,为深入理解和应用Python中的并发工具打下坚实的基础。
## 1.1 并发与并行的概念区分
首先,理解并发和并行之间的区别至关重要。并发(Concurre
【Python排序与异常处理】:优雅地处理排序过程中的各种异常情况
# 1. Python排序算法概述
排序算法是计算机科学中的基础概念之一,无论是在学习还是在实际工作中,都是不可或缺的技能。Python作为一门广泛使用的编程语言,内置了多种排序机制,这些机制在不同的应用场景中发挥着关键作用。本章将为读者提供一个Python排序算法的概览,包括Python内置排序函数的基本使用、排序算法的复杂度分析,以及高级排序技术的探
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
送3个月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )